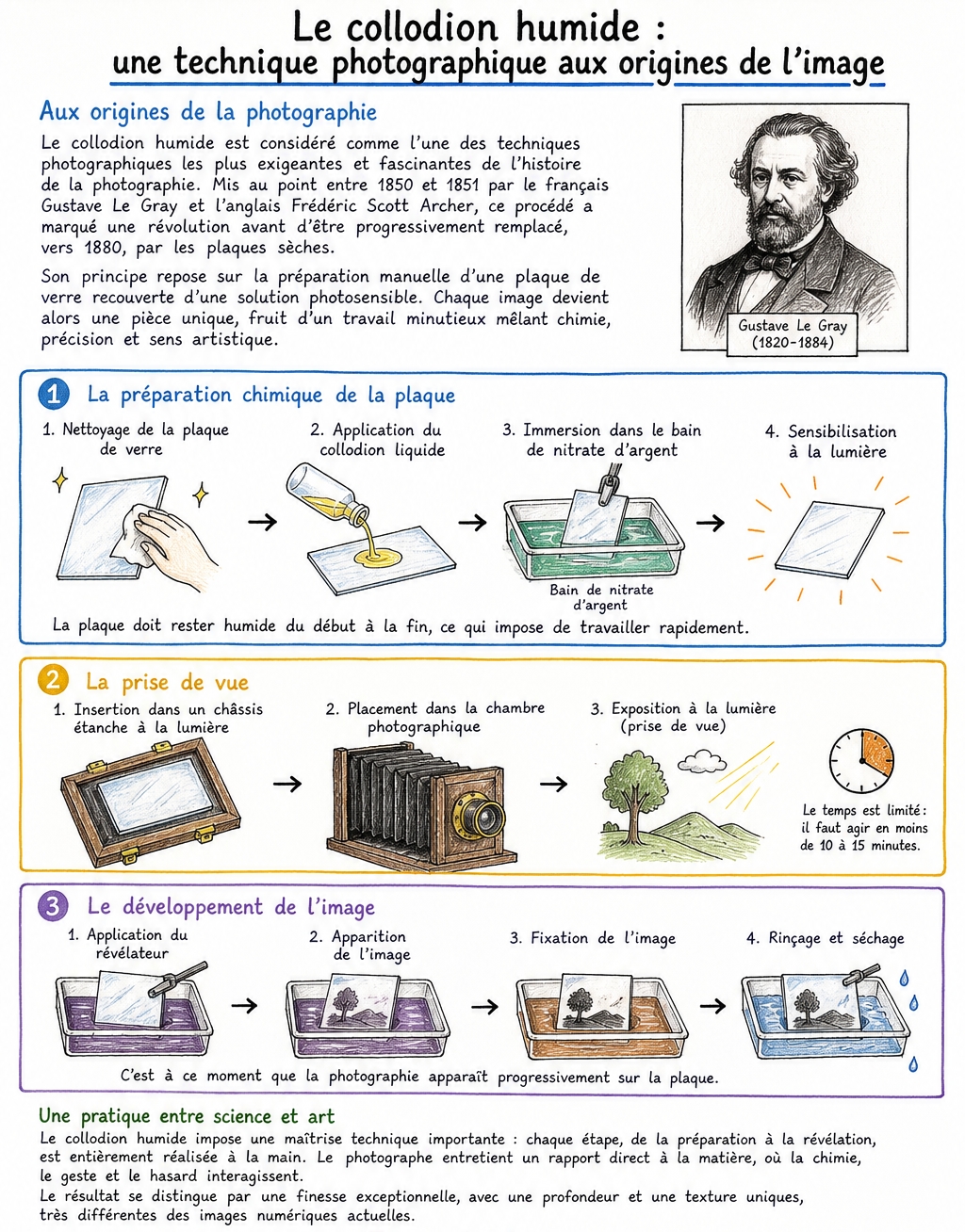
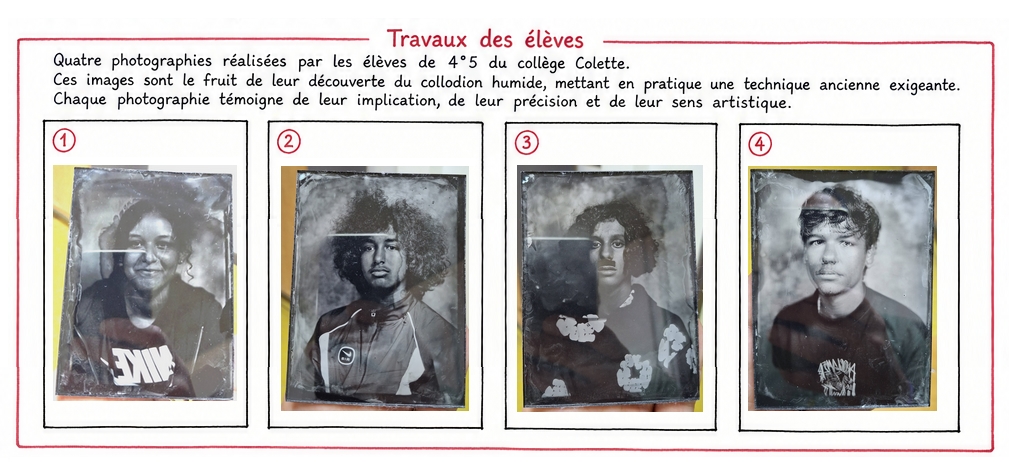
Les élèves de 4°5 du collège Colette ont travaillé au collège avec un artiste spécialiste de la photographie au collodion humique. Les élèves se sont initié à la technique photographique sur plaque de verre qui date des années 1850.
La préparation chimique de la plaque de verre est une étape essentielle qui nécessite plusieurs manipulations artisanales. Après cette étape, la plaque de verre devient sensible à la lumière il faut donc l’insérer dans un châssis porte plaque avant pouvoir l’insérer dans la chambre photographique (appareil photo à chambre )
Réaliser une modélisation 3D avec un modèle paramétrique > Comprendre l'essentiel
La modélisation paramétrique est un processus de conception qui consiste à modifier les paramètres d'un objet afin d'en générer une modélisation 3D personnalisée.
Plus besoin de dessiner l'objet en 3D, on utilise un modèle générique que l'on va paramétrer
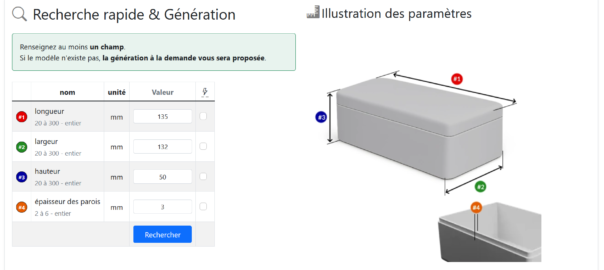
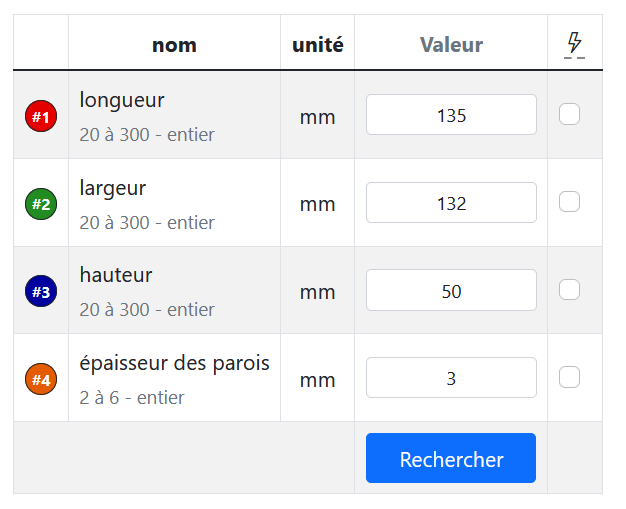
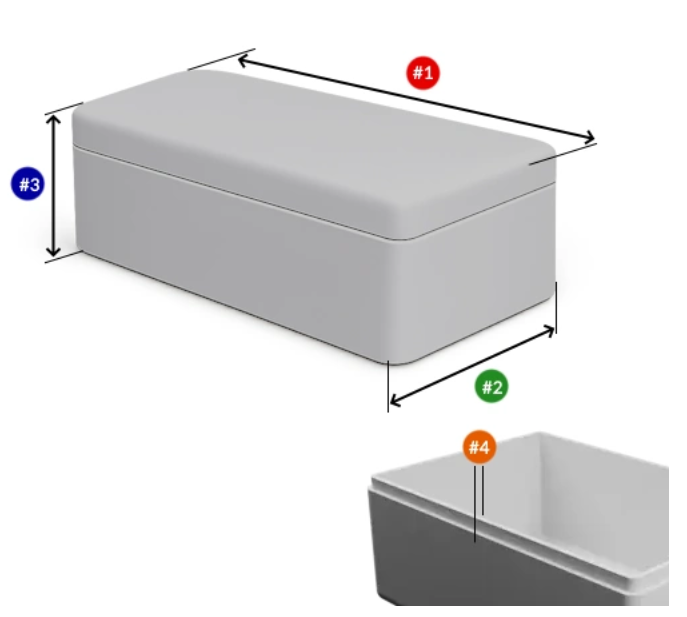
TRAVAIL A FAIRE : partie 1 > Se connecter à l’application en ligne et générer une « boîte avec couvercle » dimensions extérieur 135 X 132 X 50 mm – épaisseur de parois = 3 mm. > télécharger le fichier 3D (compressé) et le décompresser > Faire le travail partie 2 (voir plus bas)
modèle paramétrique en ligne
définir les dimensions personnalisées
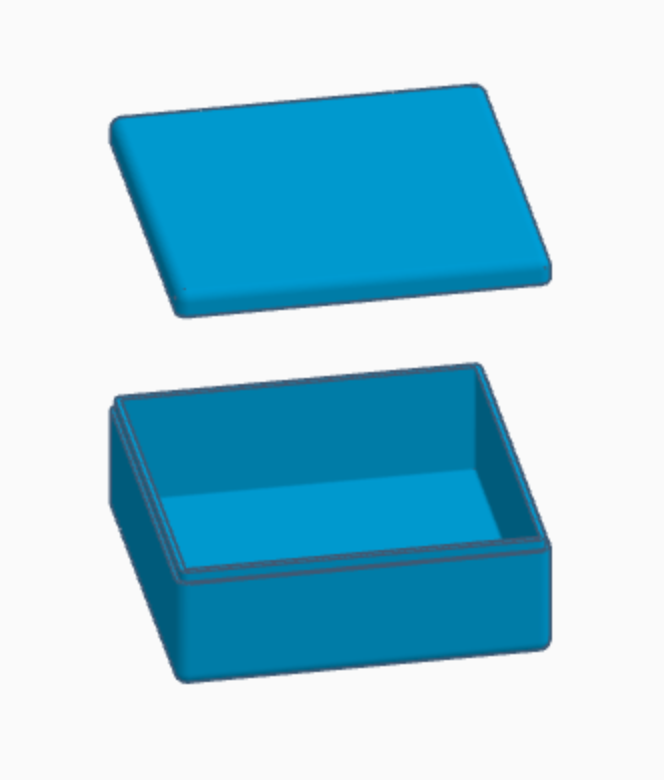
le modèle 3D est généré
Vous allez ensuite simplement télécharger le (ou les ) fichiers 3D au format .STL pour ensuite les fabriquer en impression 3D ou bien les importer dans le logiciel en ligne Tinkercad afin de finaliser les dernières formes du boîtier : c'est ce que vous devez faire dans cette activité
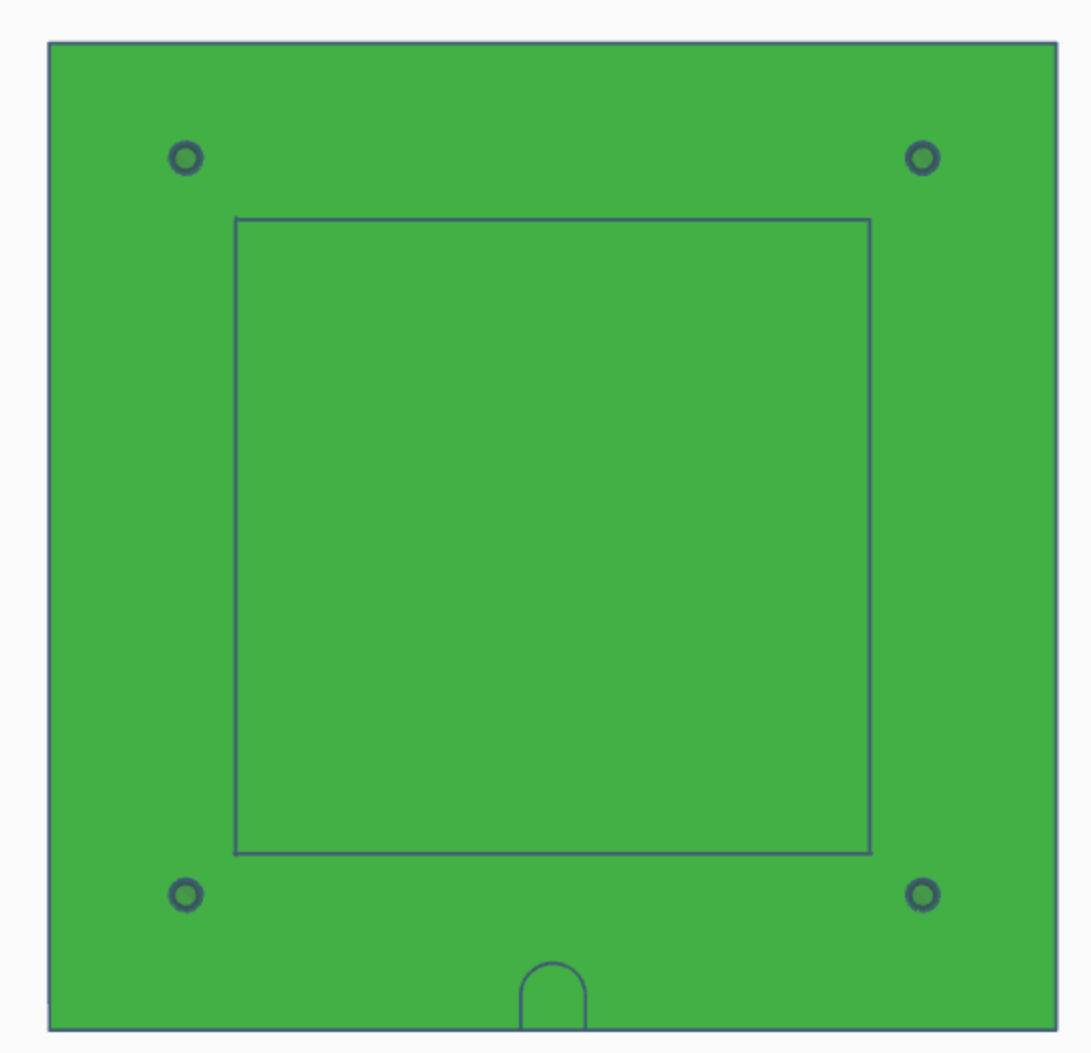
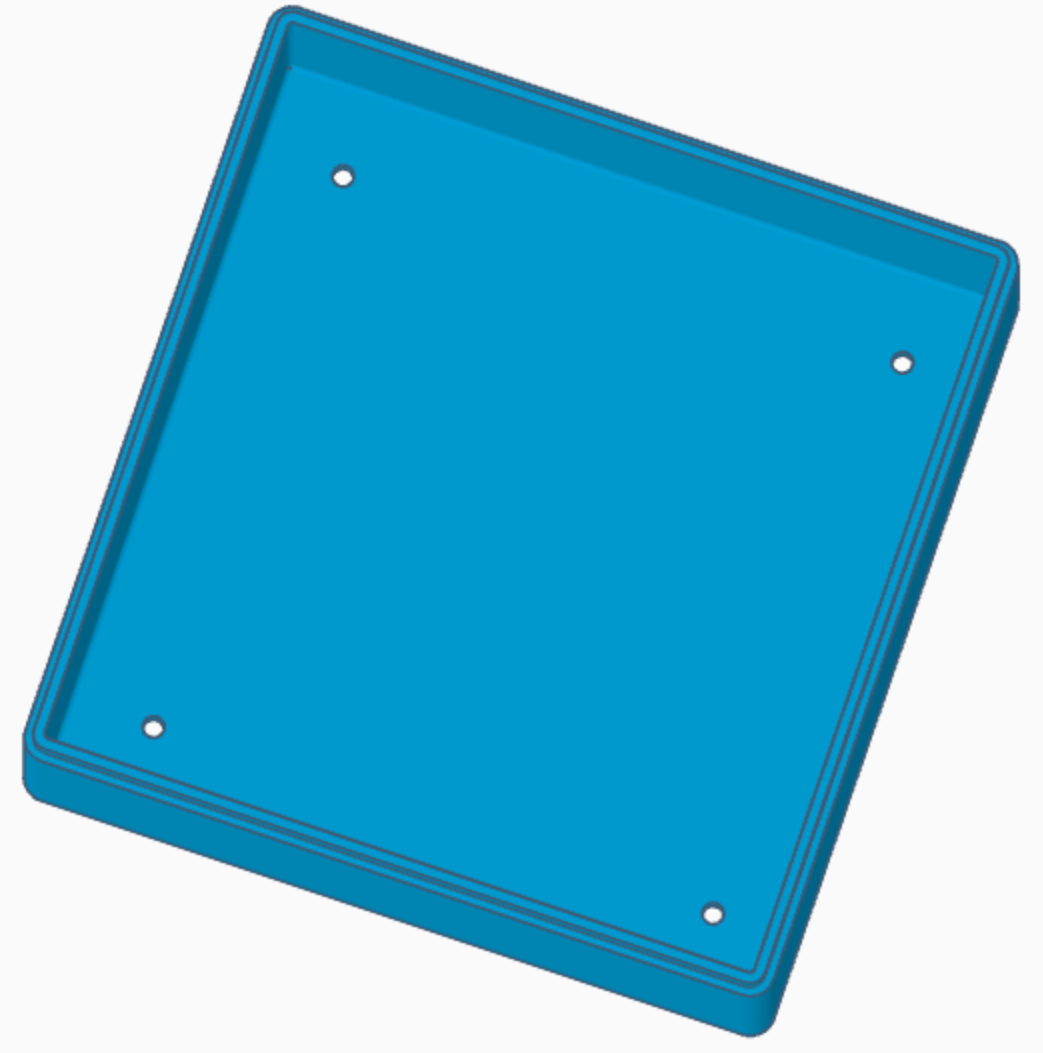
TRAVAIL A FAIRE : partie 2 – Se connecter au logiciel en ligne de conception 3D Tinkercad (de sa classe) – Importer les objets 3D (boîte + couvercle) que vous avez généré – Terminer la conception du boîtier en réalisant les opérations décrites ci-dessous : > étapes 1 à 8 : percer 4 trous de fixation dans le fond de la boîte bleu obtenue précédemment > étapes 9 à 13 : utiliser la modélisation 3D du capteur de distance HCSR04 (émetteur-récepteur à Ultrasons) pour percer les 2 trous permettant la mise en place du capteur dans le fond de la boîte bleu.
étapes 1 à 8 : perçage par enlèvement de matière (soustraction de matière)
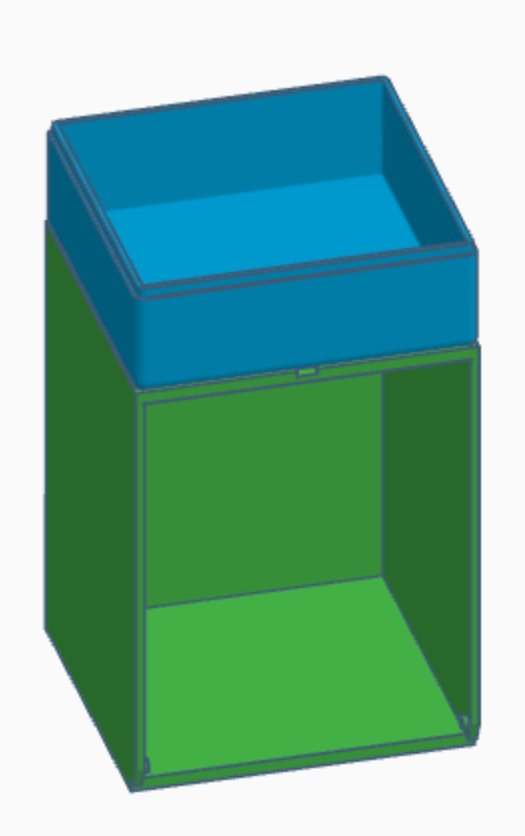
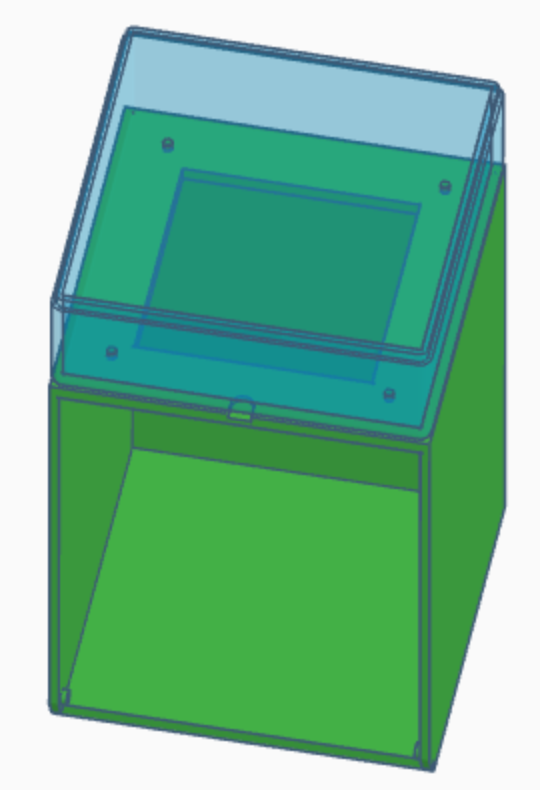
1- Placer la boite au dessus du corps de la poubelle, aligner sur les 2 axes Longueur et largeur. 2- masquer la boite bleu
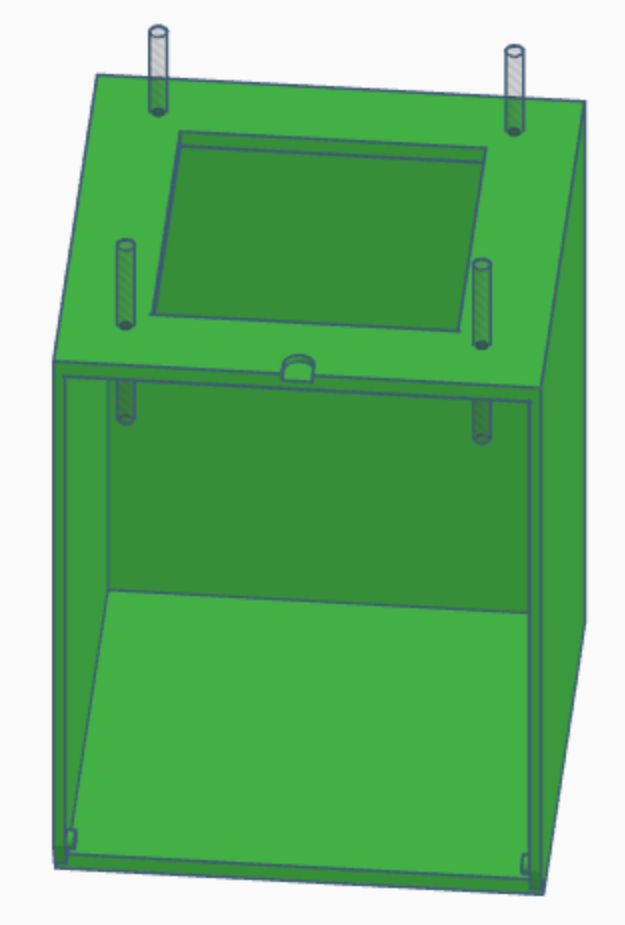
3- Zoomer et placer 4 cylindres diamètre 4 mm et de longueur environ 60 mm (volume de perçage = matière à enlever)
4 – Placer les 4 cylindres de façon à traverser la matière verte (corps de la poubelle).
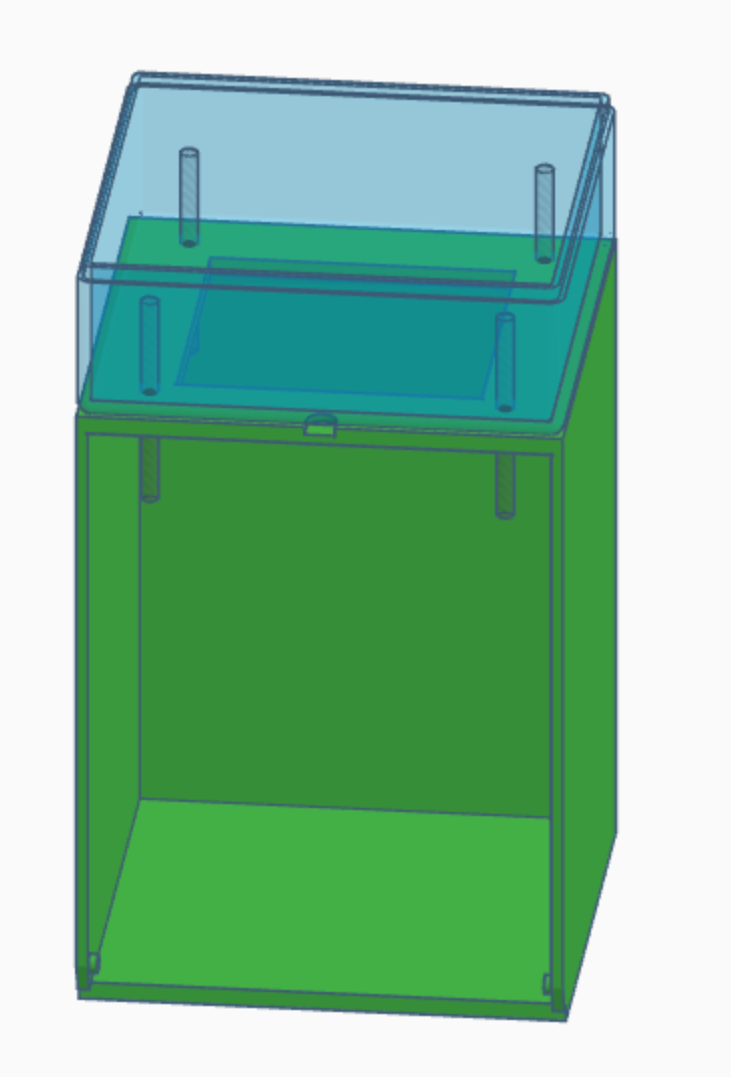
5- Montrer la boîte qui avait été précédemment cachée et vérifier le bon alignement des éléments
6- Masquer le corps de la poubelle (pièce verte)
7- Sélectionner l’ensemble des éléments : boîte + 4 cylindres et « regrouper en union » afin de réaliser l’opération de soustraction de matière (perçage des 4 trous)
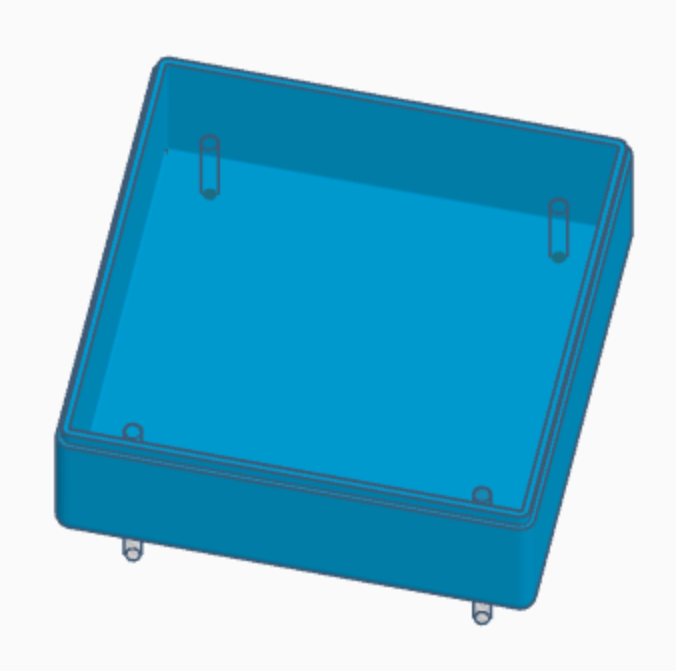
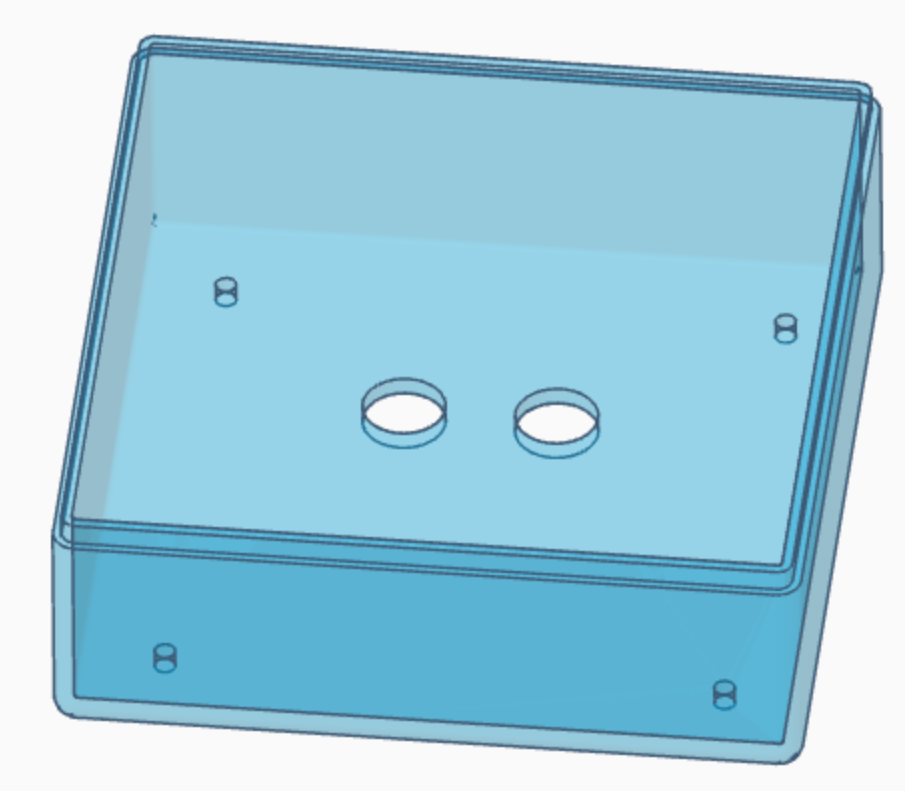
8- Les perçages sont maintenant réalisés….Montrer l’ensemble des pièces cachées pour vérifier le rendu final
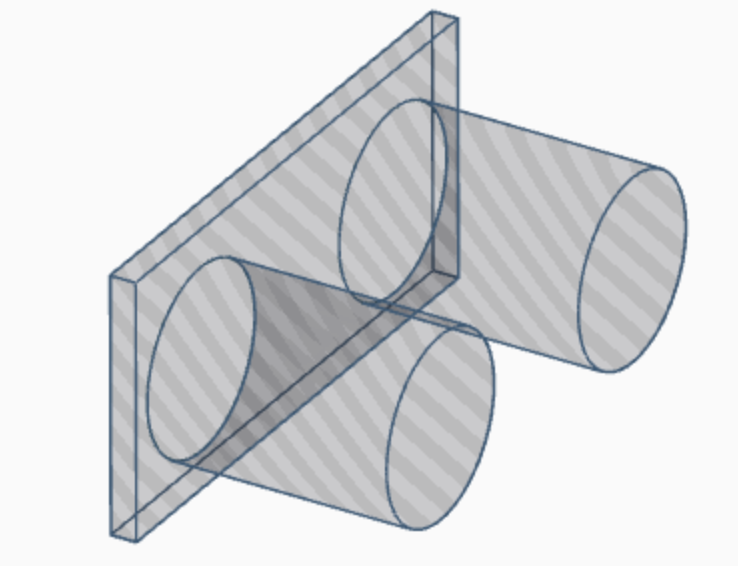
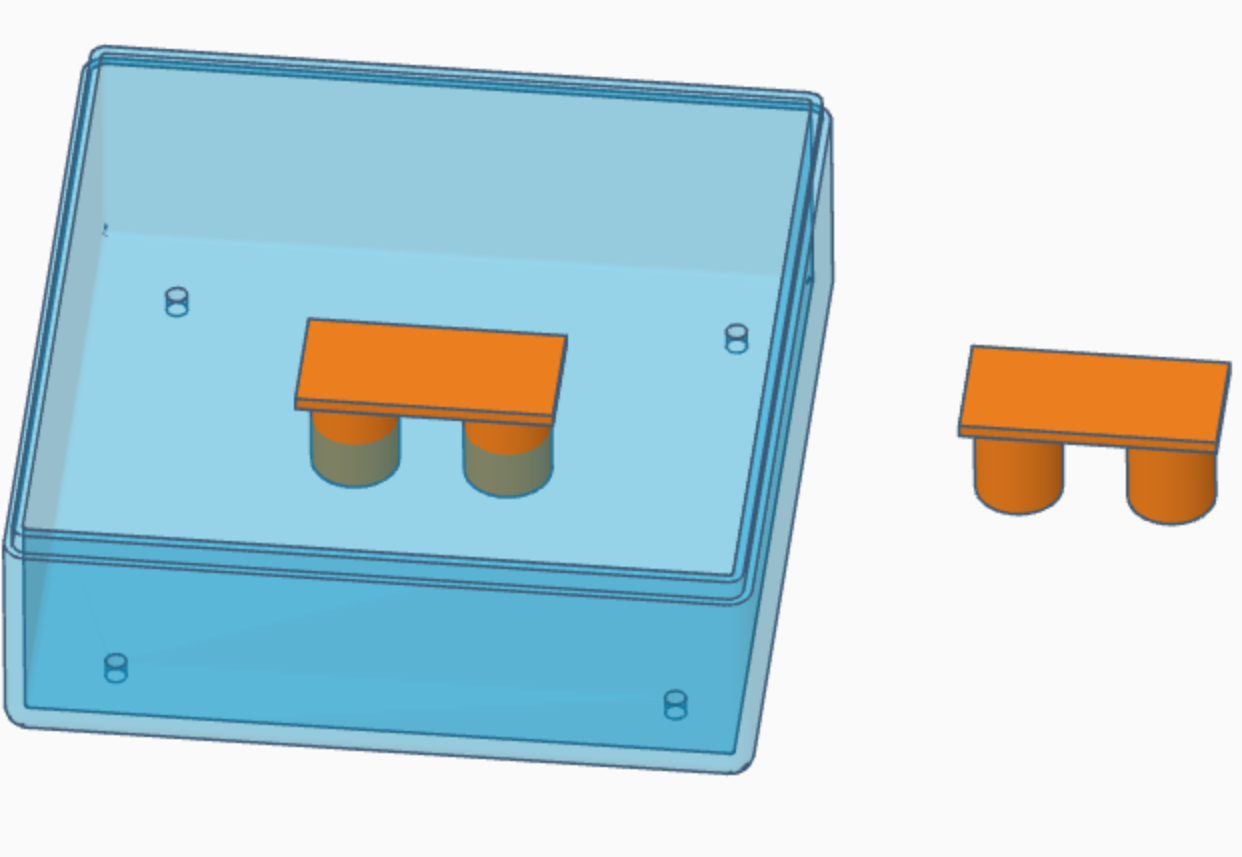
étapes 9 à 13 : façonner un enlèvement de matière pour le capteur HCSR04
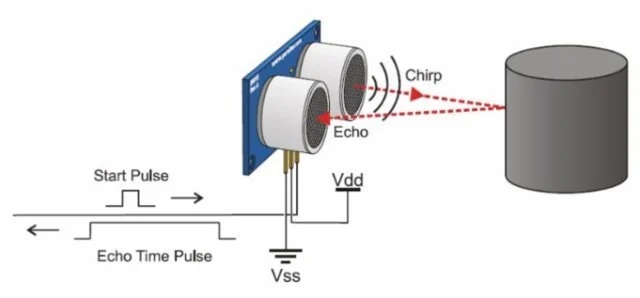
capteur de distance HC-SR04
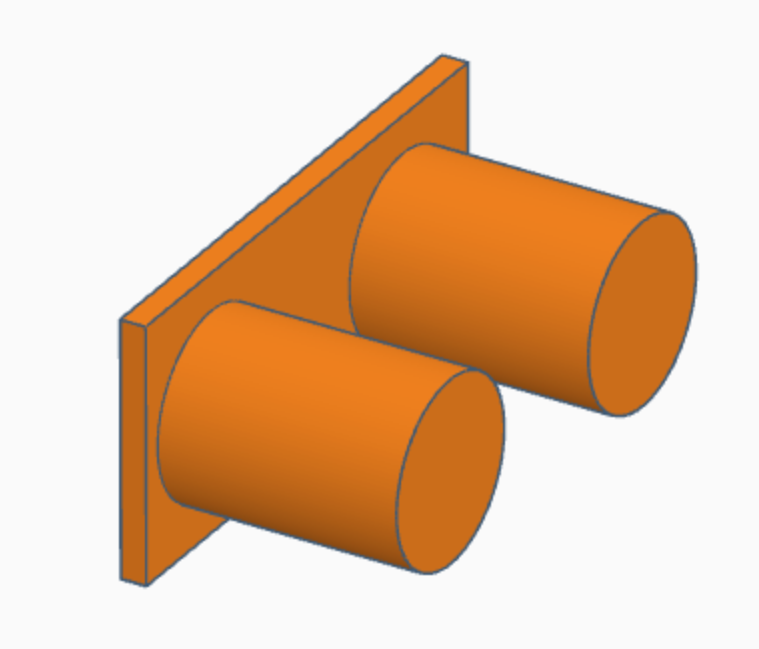
Modélisation 3D du capteur (solide)
Modélisation 3D du capteur (perçage)
9- Placer la modélisation du capteur HCSR04 dans le fond de la boîte et centré
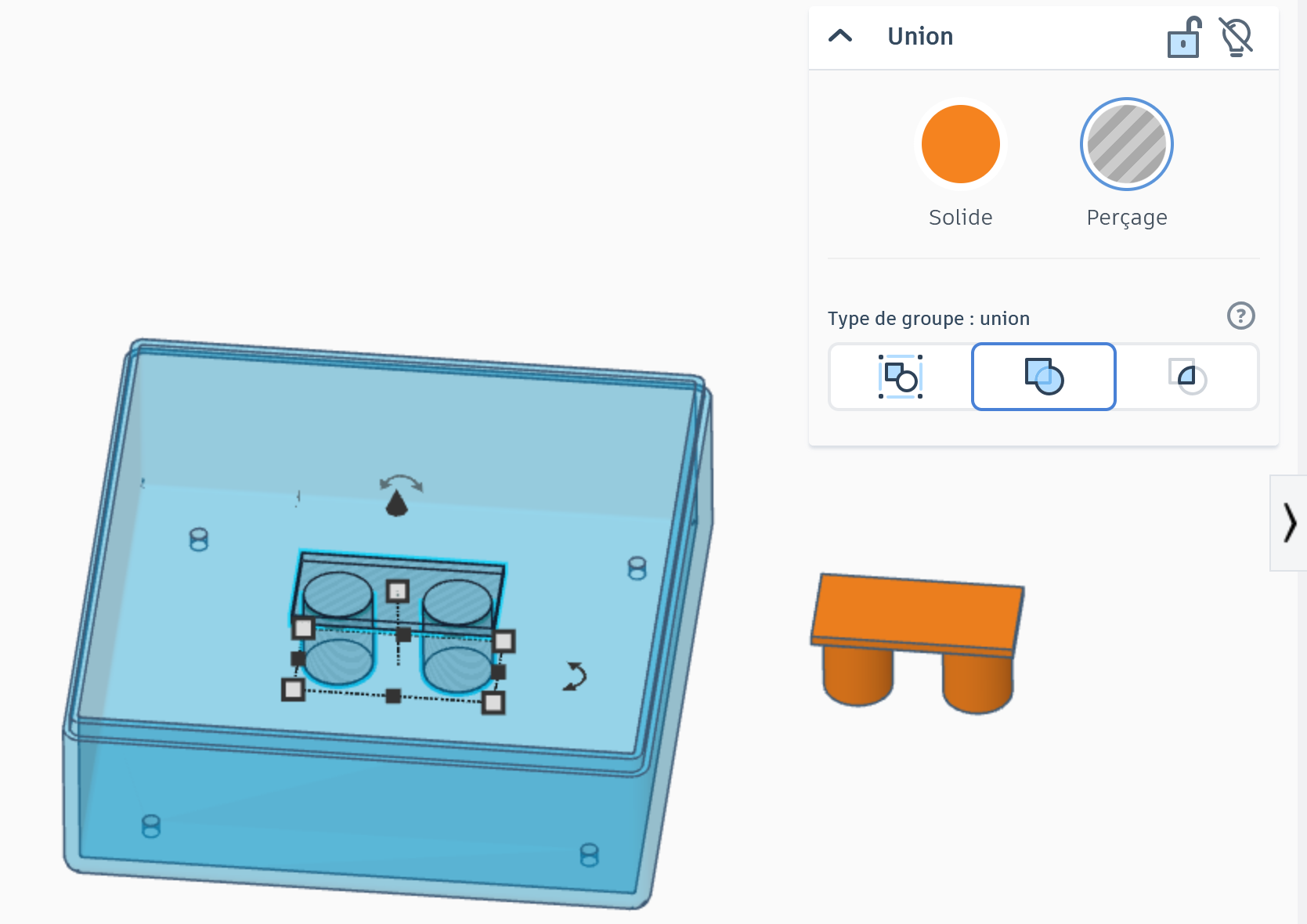
10- Transformer l’aspect du solide (orange) en perçage (hachuré transparent).
11- Regrouper en Union afin de finaliser l’enlèvement (soustraction) de matière
Axe / Thème : Structure, fonctionnement, comportement : des OST à comprendre
Compétences travaillées : Le choix d’un OST dans un contexte de développement durable | Repérer pour un OST les matériaux, les sources et les formes d’énergie, le traitement de l’information, Fonctions, solutions, constituants de la chaîne d’énergie | Associer des solutions techniques à une ou des fonctions techniques, Fonctions, solutions, constituants de la chaîne d’énergie | Identifier des constituants de la chaîne d’énergie d’un objet technique (l’organisation de la chaîne d’énergie étant fournie), Fonctions, solutions, constituants de la chaîne d’information | Identifier des constituants de la chaîne d’information d’un OST (l’organisation de la chaîne d’information étant fournie).
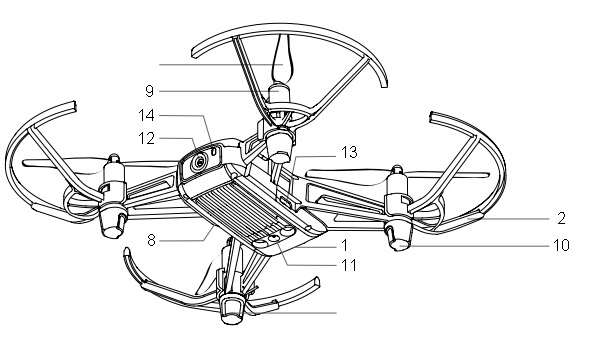
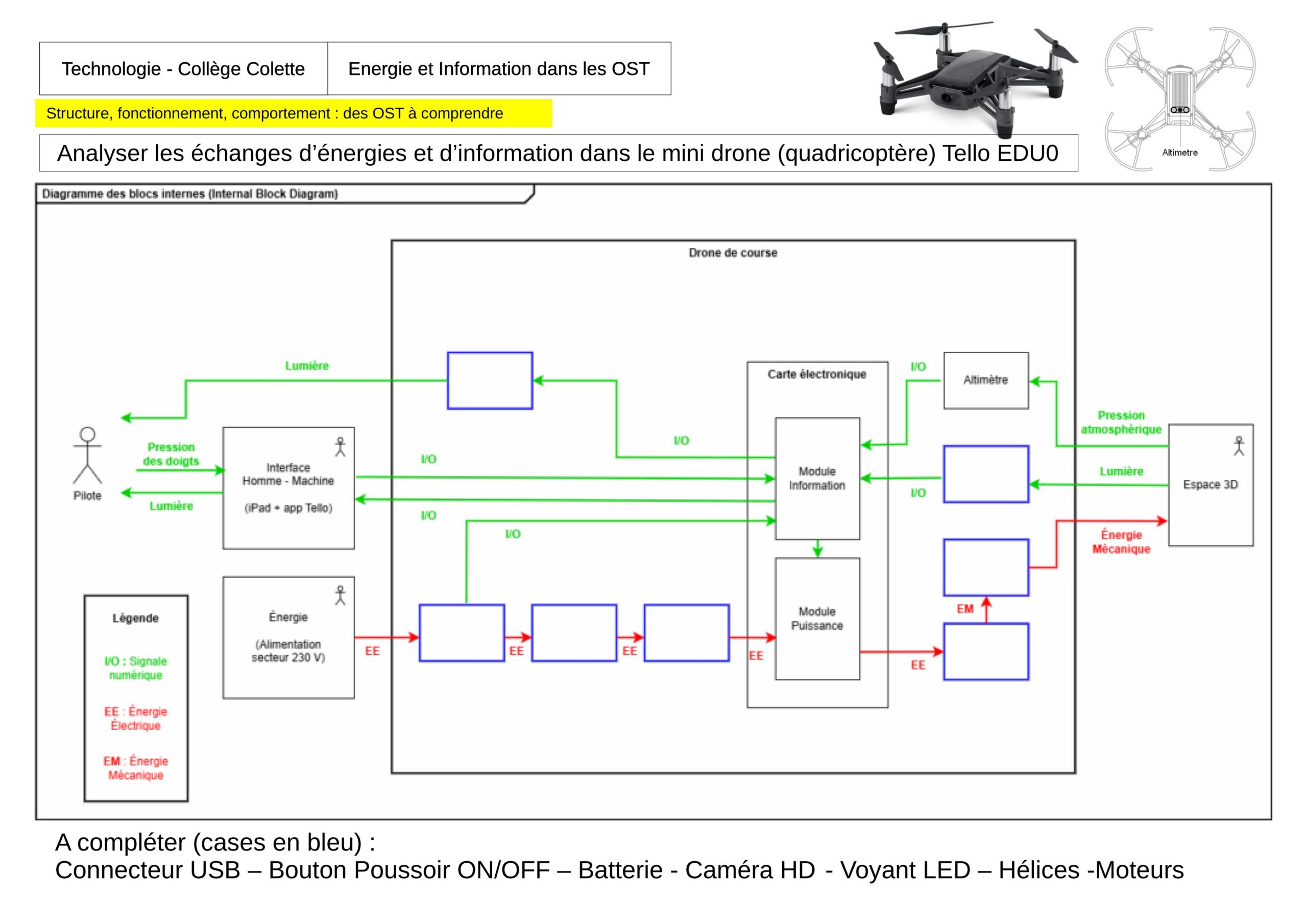
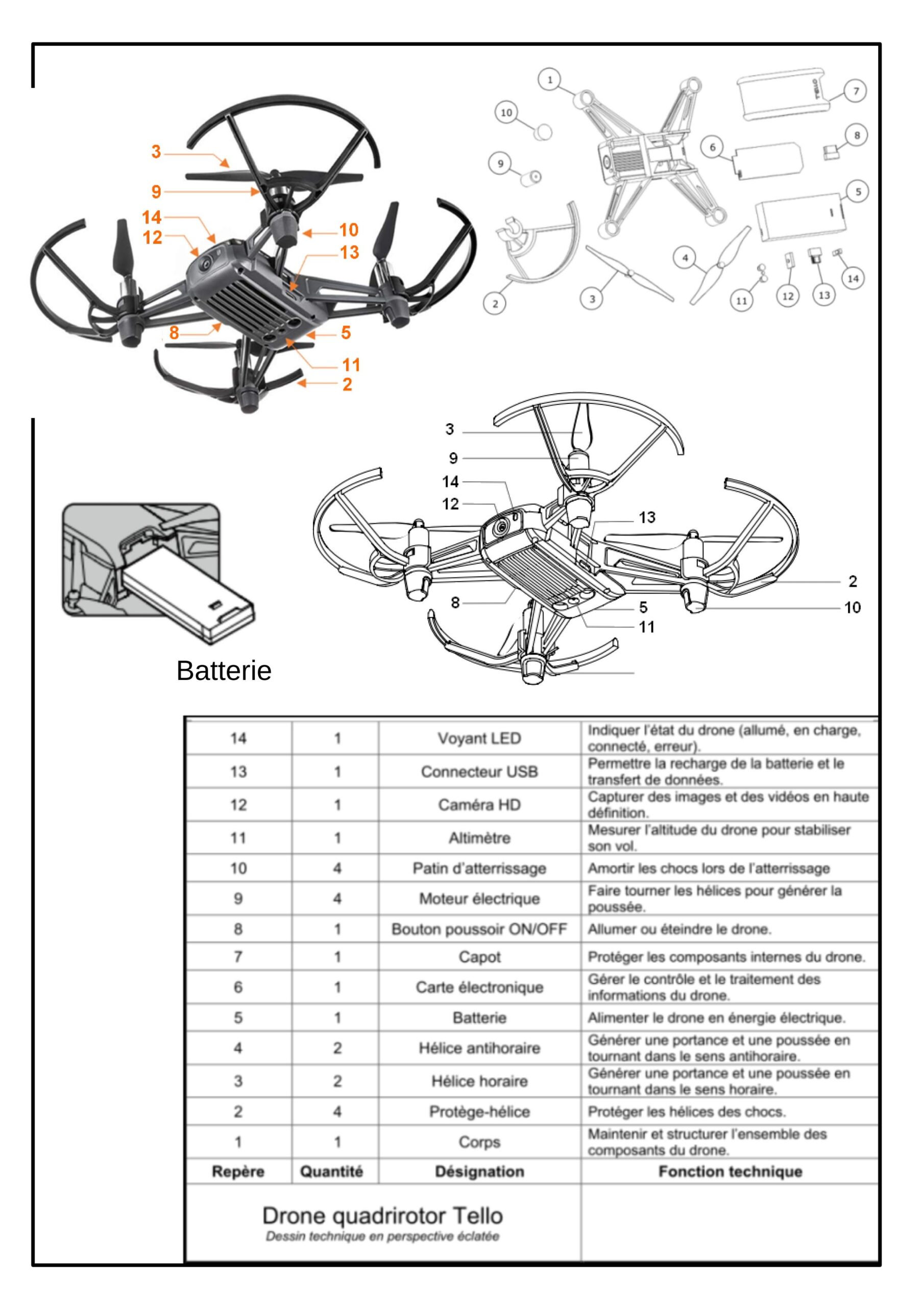
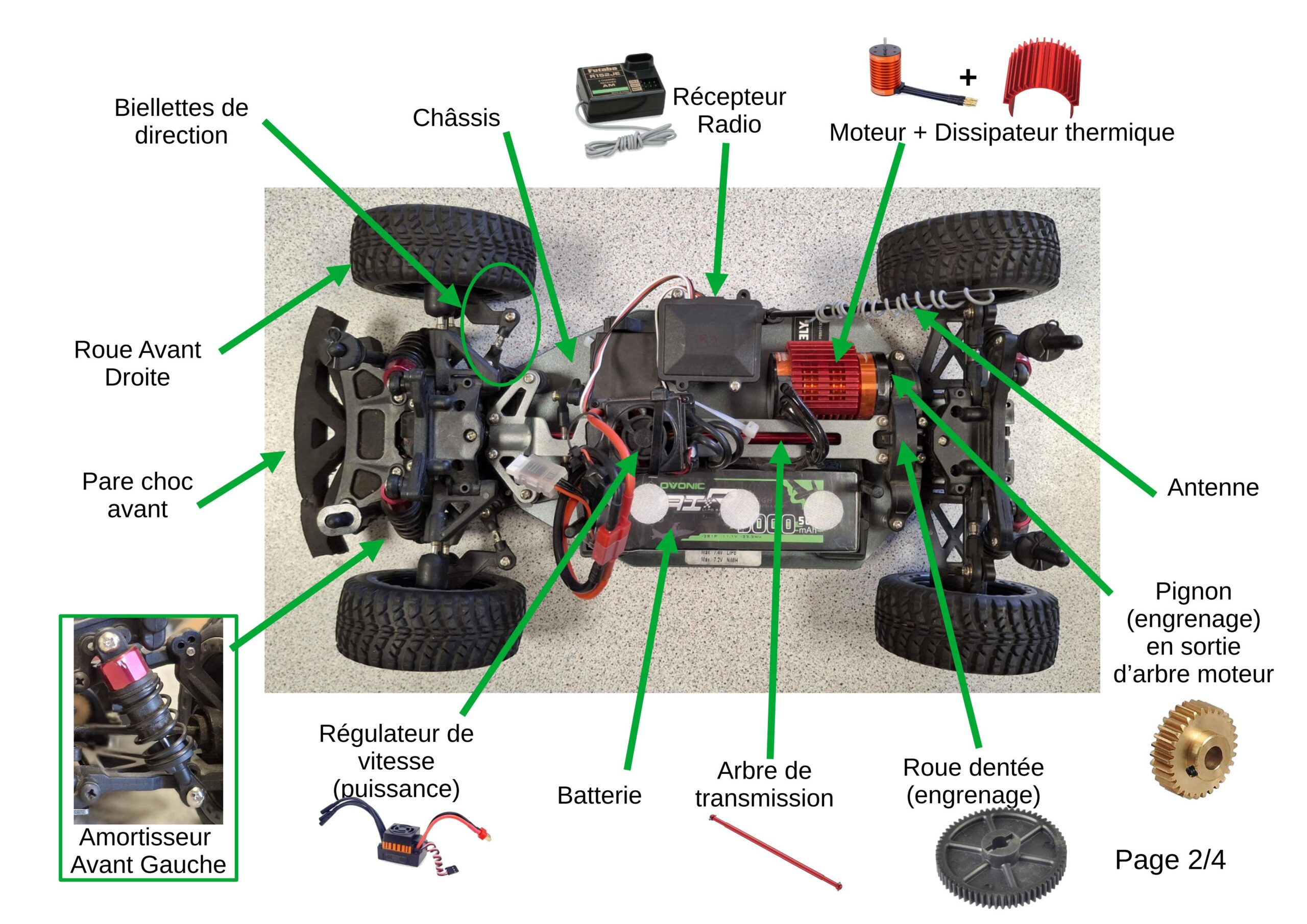
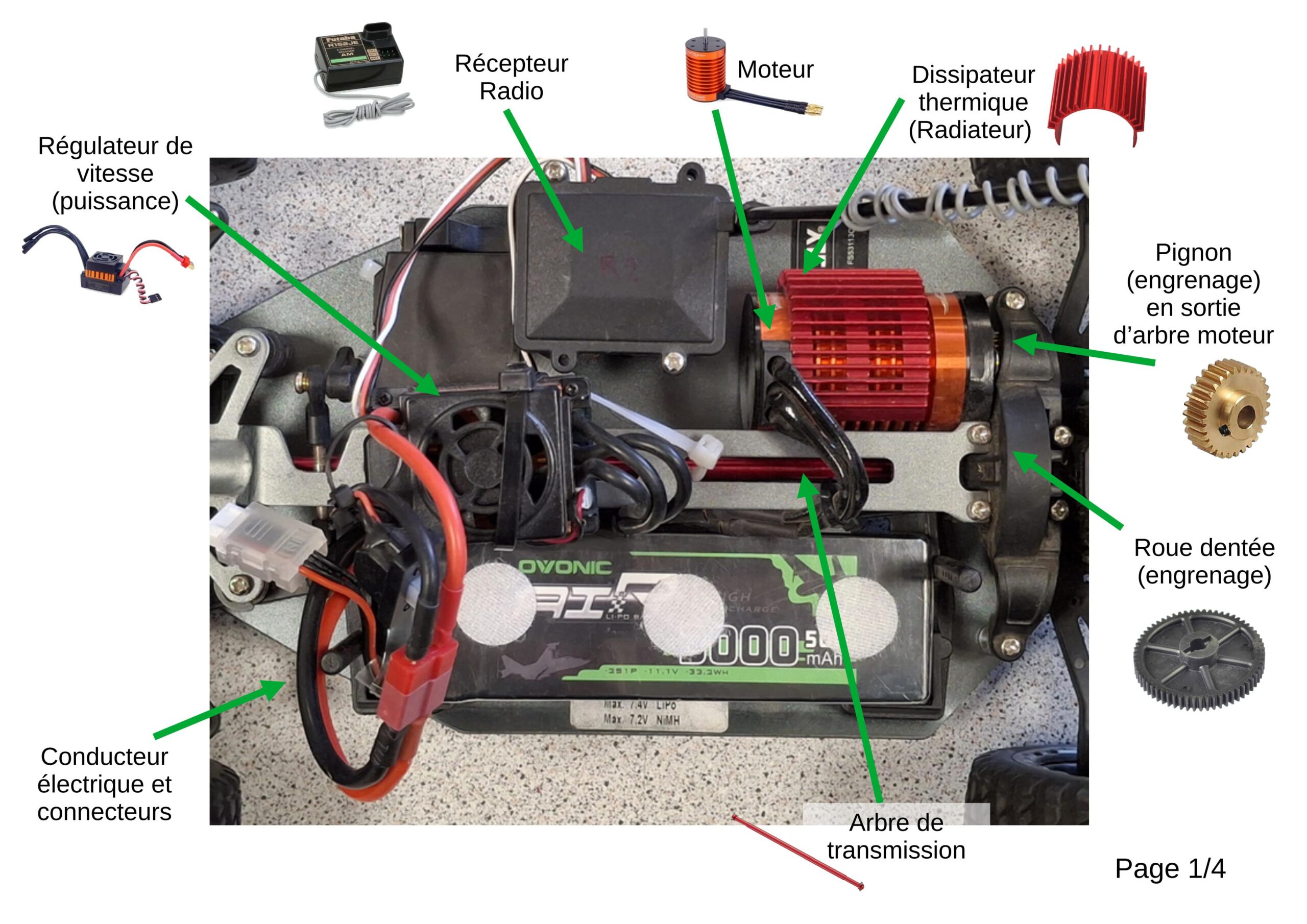
Travail à faire : Observer le mini drone Tello EDU disponible en classe ainsi que la Nomenclature (ci-dessous à droite) du drone afin d’identifier les différents composants de l’objet technique. Compléter le diagramme des Bloc Interne (méthode d’analyse SysML) ci-dessous à gauche.
Diagramme des Blocs Internes (Méthode d'analyse SysML)
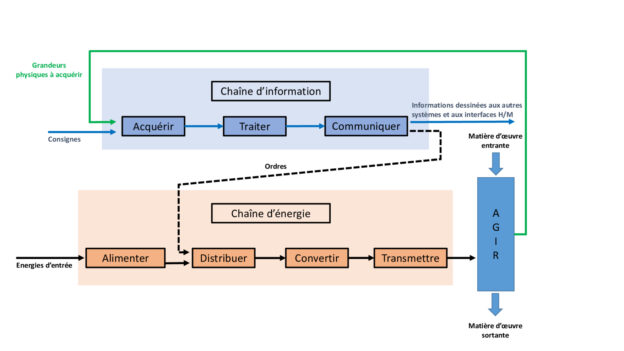
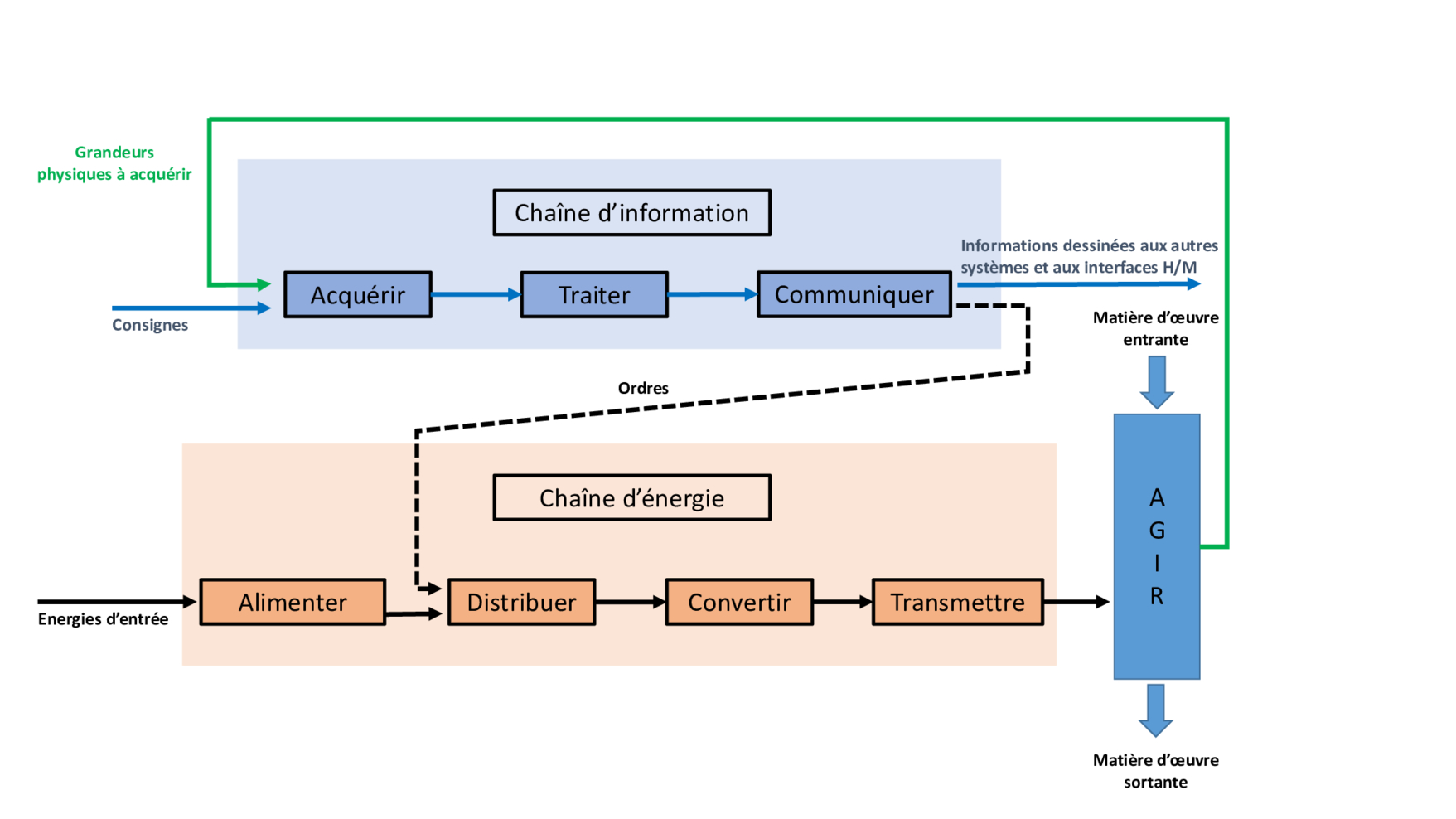
La chaîne d’énergie et la chaîne d’information Quand un objet ou système technique (OST) fonctionne, comme un vélo électrique ou un robot, il y a deux choses importantes qui se passent :
La chaîne d’énergie C’est tout ce qui concerne l’énergie nécessaire pour réaliser l’action souhaitée. Il y a 4 étapes principales : Alimenter : fournir de l’énergie (ex : une batterie ou une prise électrique). Distribuer : moduler et envoyer l’énergie vers les éléments (ex : câbles électriques). Convertir : transformer l’énergie (ex : moteur électrique, l’électricité est transformée en mouvements). Transmettre : faire passer le mouvement jusqu’à l’endroit voulu (ex : chaîne d’un vélo). Exemple : Sur une trottinette électrique, la batterie (alimentation) envoie l’énergie au moteur (conversion), qui fait tourner la roue (transmission).
La chaîne d’information C’est tout ce qui concerne la prise de décision et le contrôle du système. Il y a 3 étapes principales : Acquérir : capter des informations (ex : un capteur détecte si quelqu’un appuie sur l’accélérateur). Traiter : analyser ces informations et prendre une décision (ex : le calculateur ou le variateur décide d’envoyer plus d’énergie au moteur). Communiquer : envoyer l’ordre d’action (ex : le moteur reçoit l’ordre d’accélérer) et informe l’utilisateur (affiche la vitesse). Exemple : Sur une voiture télécommandée, quand on appuie sur la télécommande, elle envoie un signal (acquisition), qui est analysé par un circuit électronique (traitement), puis l’ordre est envoyé au moteur pour avancer (communication).
En résumé : La chaîne d’énergie fait fonctionner l’OST avec de l’énergie, ce sont les actions. La chaîne d’information dit à l’OST quoi faire et quand le faire, ce sont les tests et les ordres.
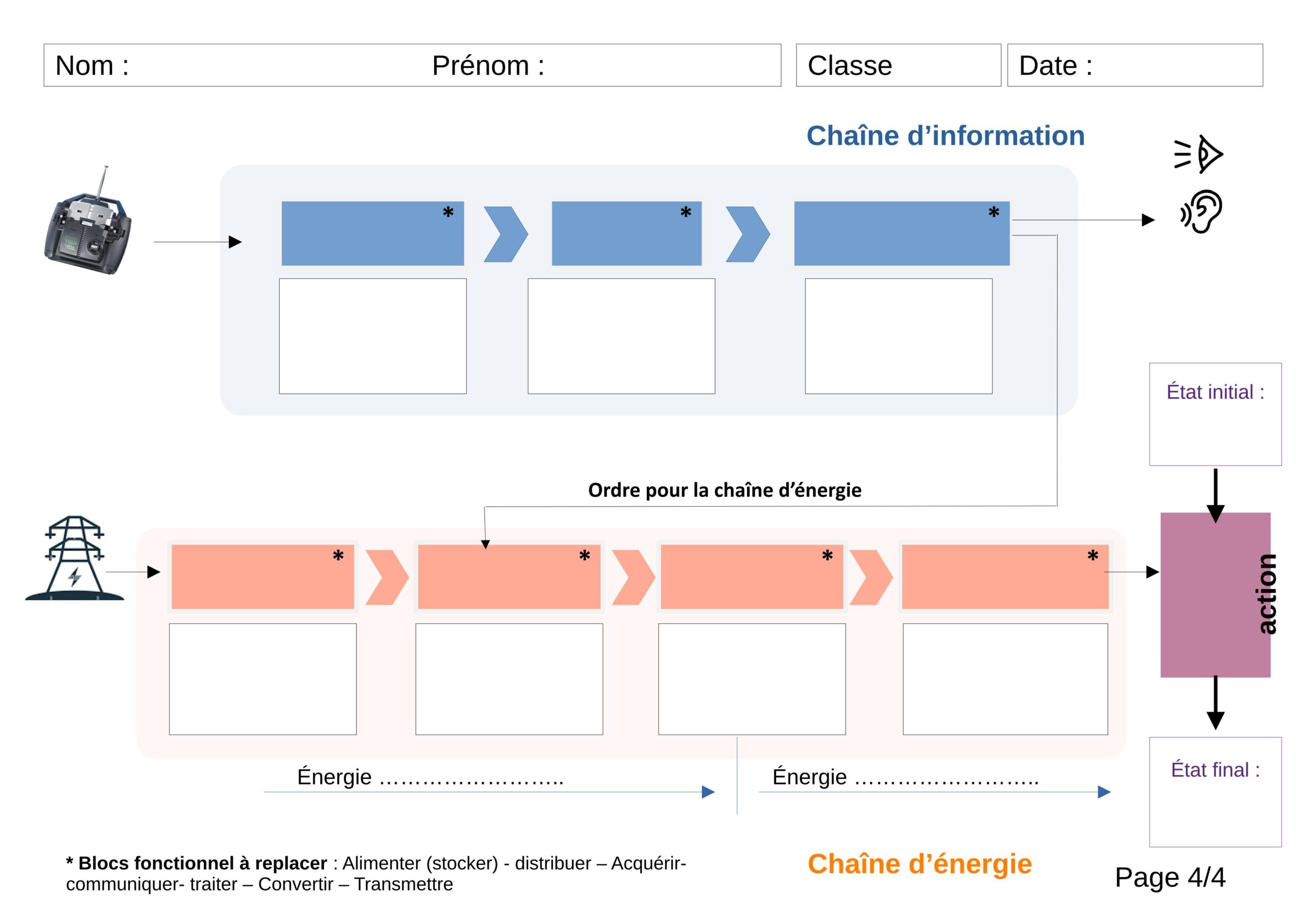
Après avoir observé l’objet technique réel en classe, puis en vous aidant des informations de cette page, compléter le diagramme des chaînes d’informations et d’énergie (appelé aussi chaînes fonctionnelles).
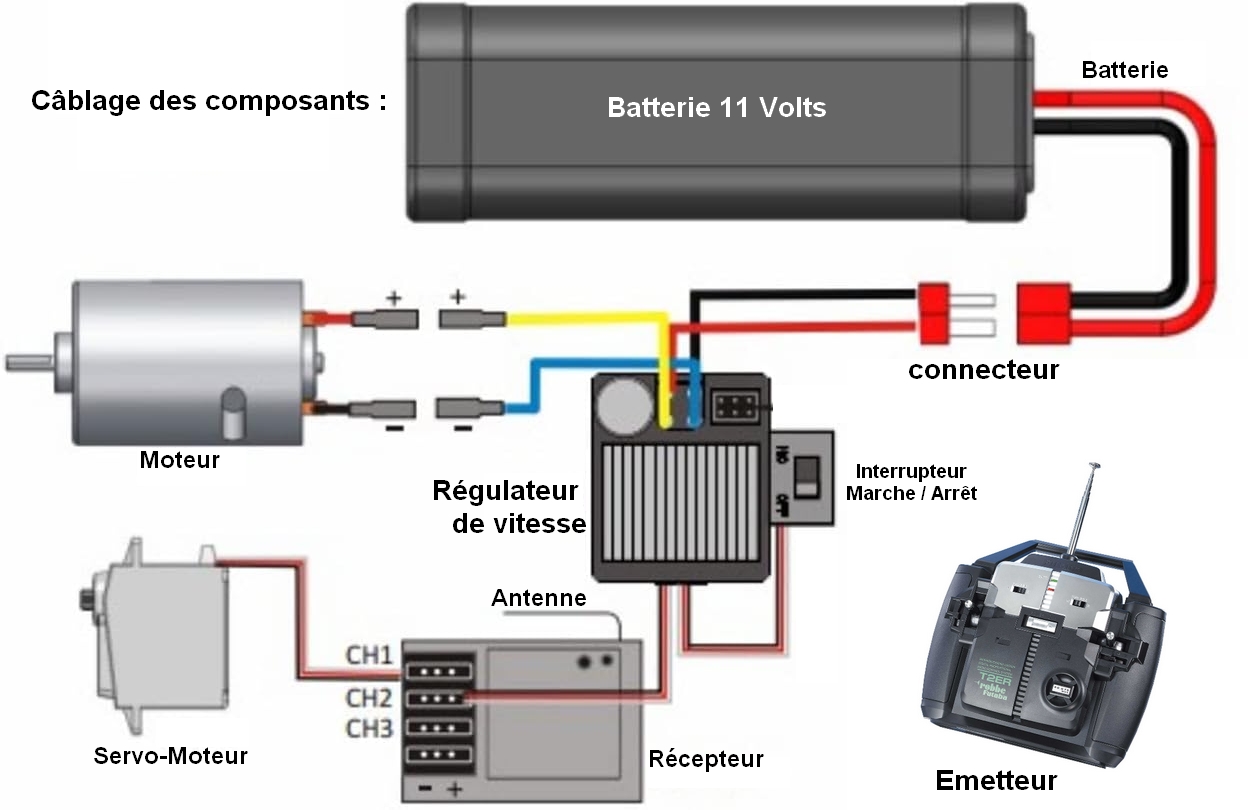
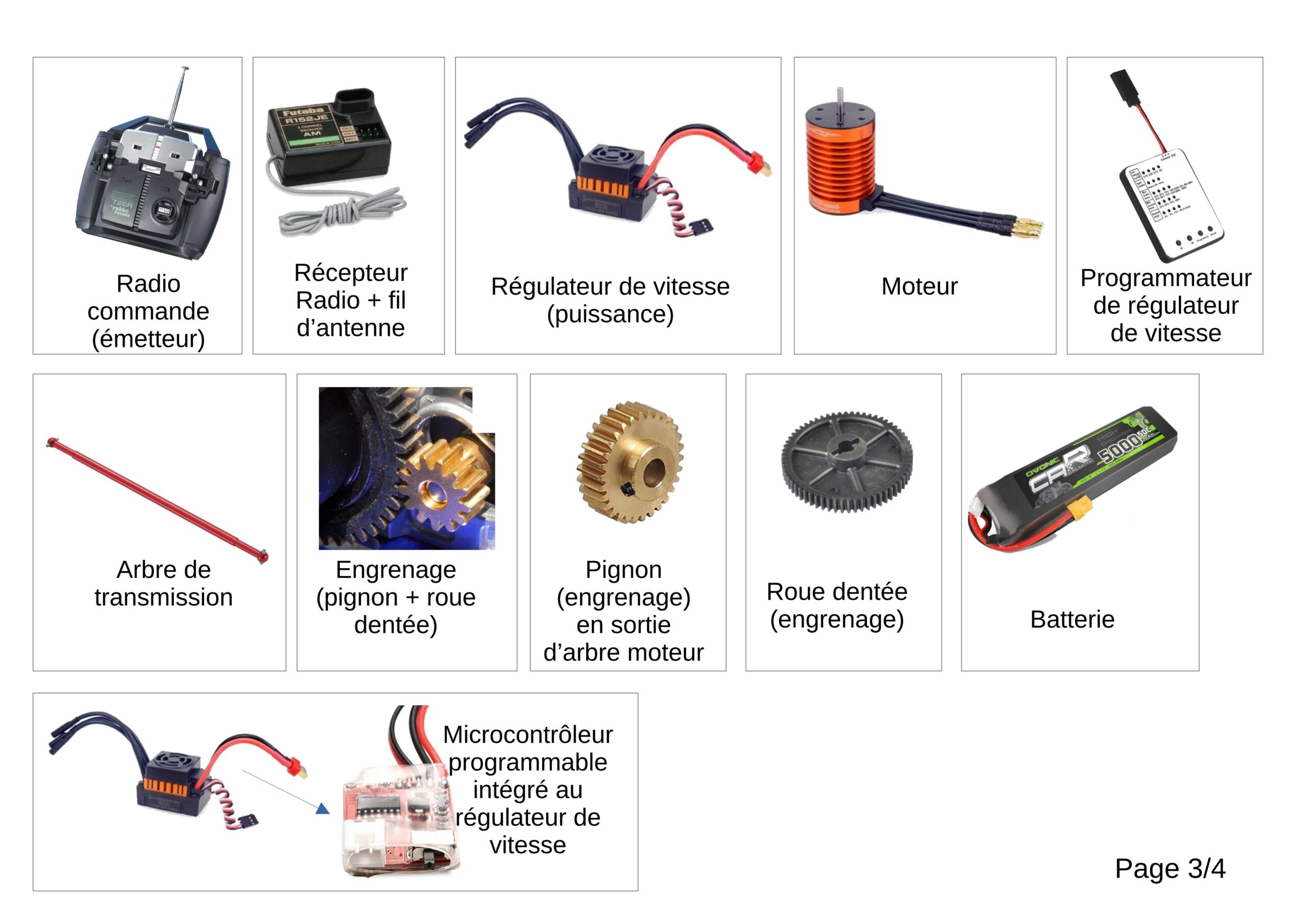
Echangez avec votre groupe afin d’identifier et de replacer correctement les « blocs fonctionnels » dans les rectangles bleu ou orange (marqué une * ) puis placer en dessous les solutions techniques (composants de la voiture Radio Commandée RC) réalisant concrètement la fonction de chaque bloc fonctionnel.
CONSIGNES DE TRAVAIL HABITUELLES : > travailler dans le calme, parler à voix basse > ne pas échanger avec les autres groupes > s’impliquer sincèrement et gérer le temps de travail indiqué par l’enseignant pour mener à bien cette partie de l’activité
Ressource 1 : schéma du diagramme Fonctionnel avec les blocs fonctionnels de la chaîne d'énergie et de la chaine d'information
La voiture Reely Echelle 1:10 - 4 roues motrices
Cours intractif à regarder à la maison
Ressource 2 : Animation interactive : la chaîne d'information
Ressource 3 : Animation interactive : la chaîne d'énergie
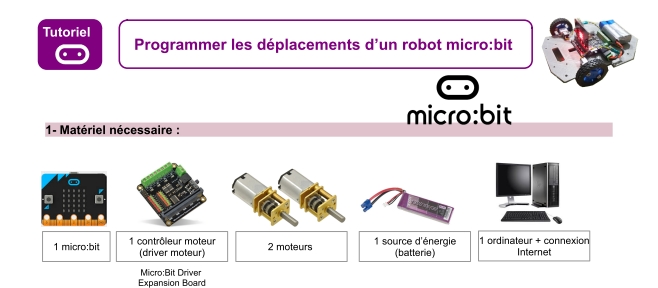
Activités de découverte et d'initiation à la Robotique Educative
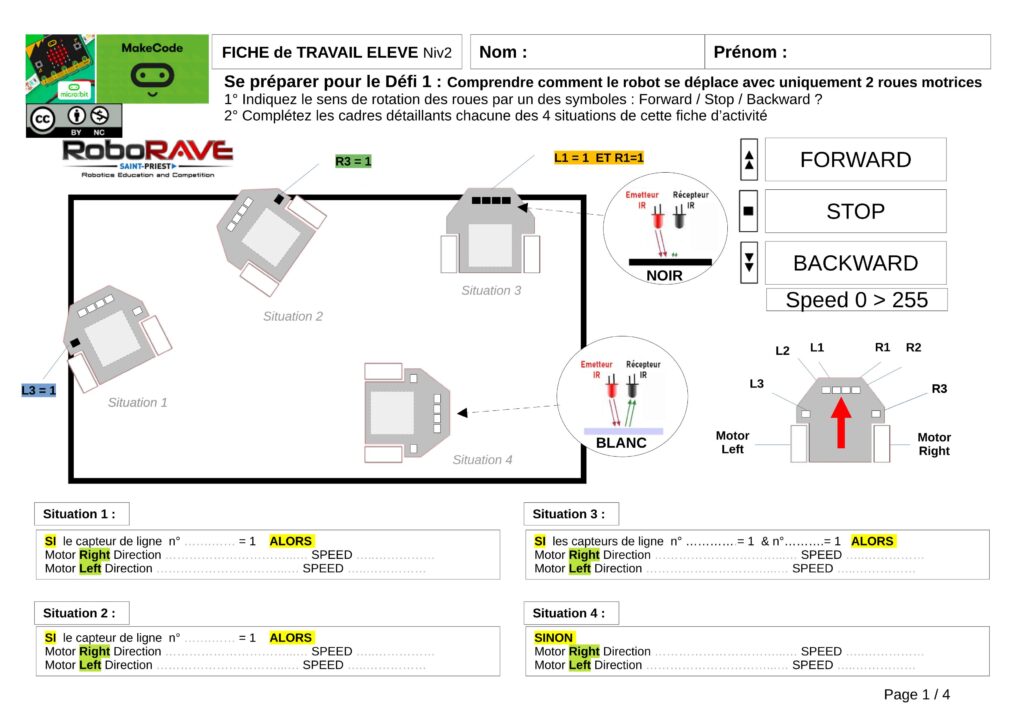
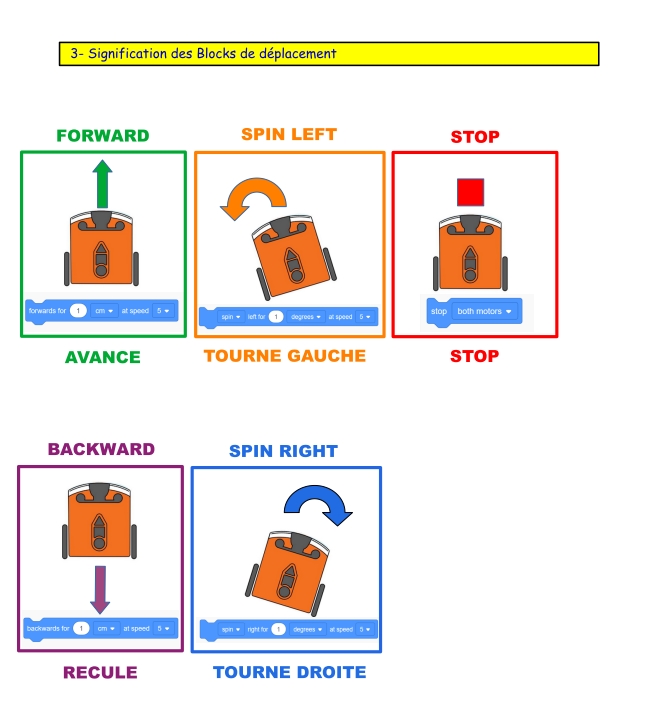
> Comprendre les déplacements d'un robots mobile (2 roues) > Programmer des détecteurs de lignes (capteurs Infra rouges) > programmer les déplacements du Robot à travers des défis
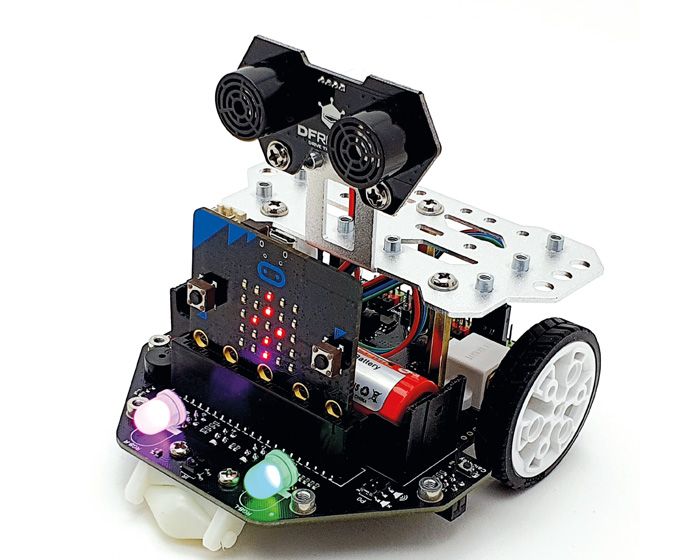
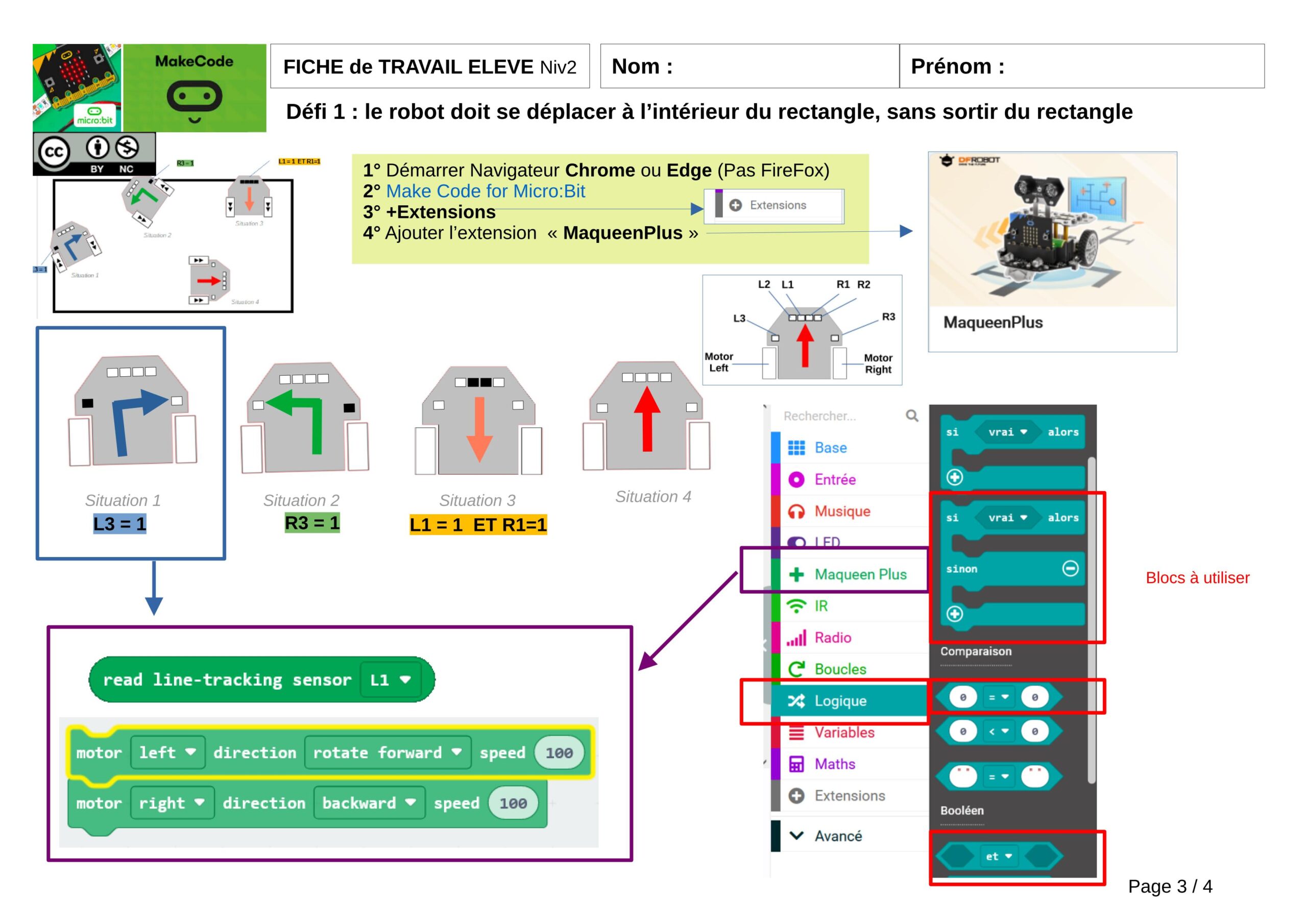
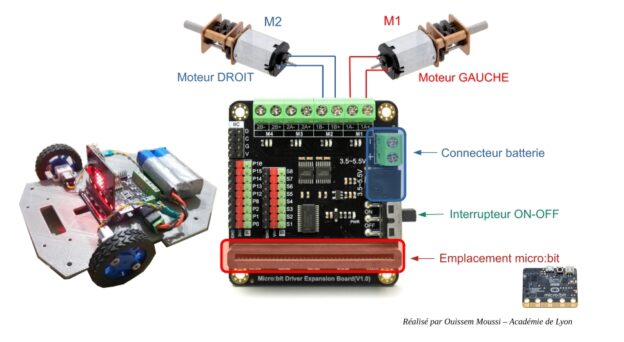
Découverte du Robot Maqueen Plus V1.0
Cliquez ci-dessus pour se Connecter à Make Code en ligne
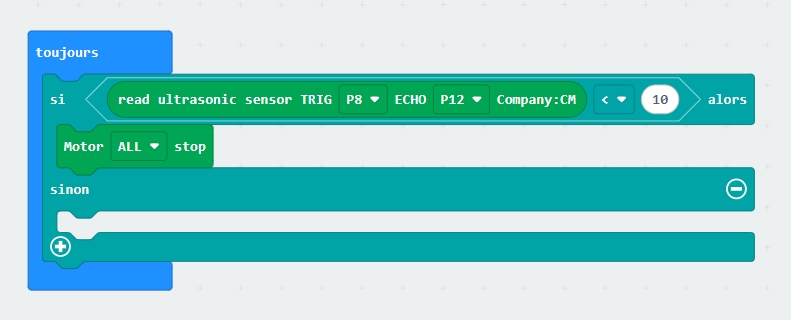
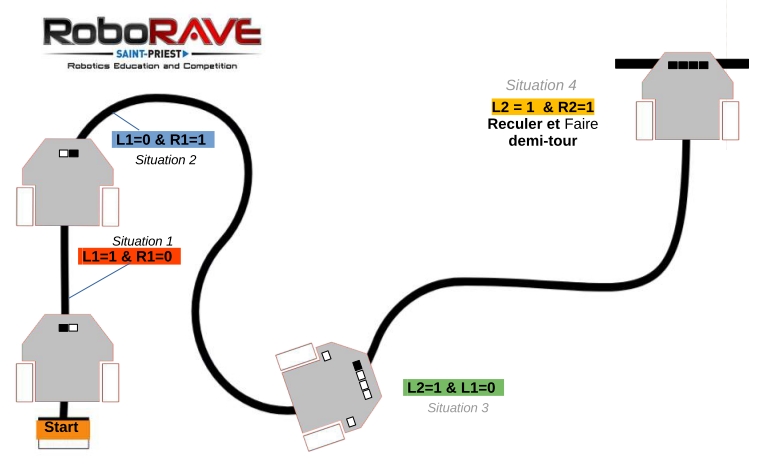
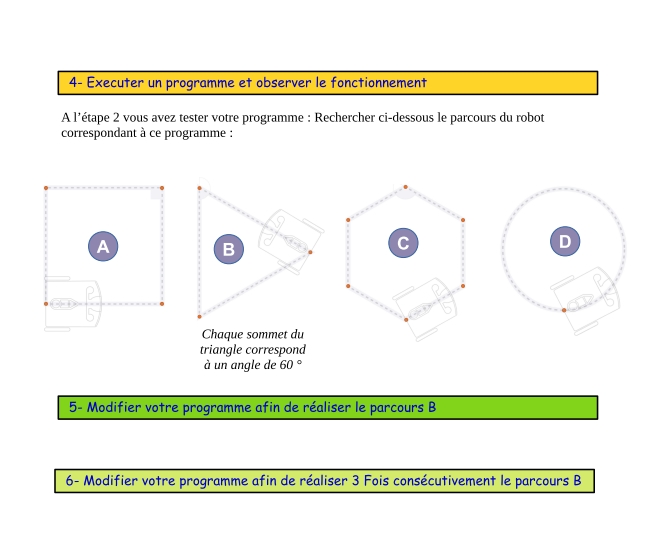
Objectifs de l’activité 2 : > programmer les déplacements du Robot > le robot doit se déplacer à l’intérieur du rectangle blanc à bords noirs > le robot ne doit pas sortir du rectangle
> le robot doit changer de direction afin de ne jamais sortir du rectangle
SI la distance est inférieur à 10 com ALORS
Arrêter le Robot
SINON se déplacer dans le rectangle
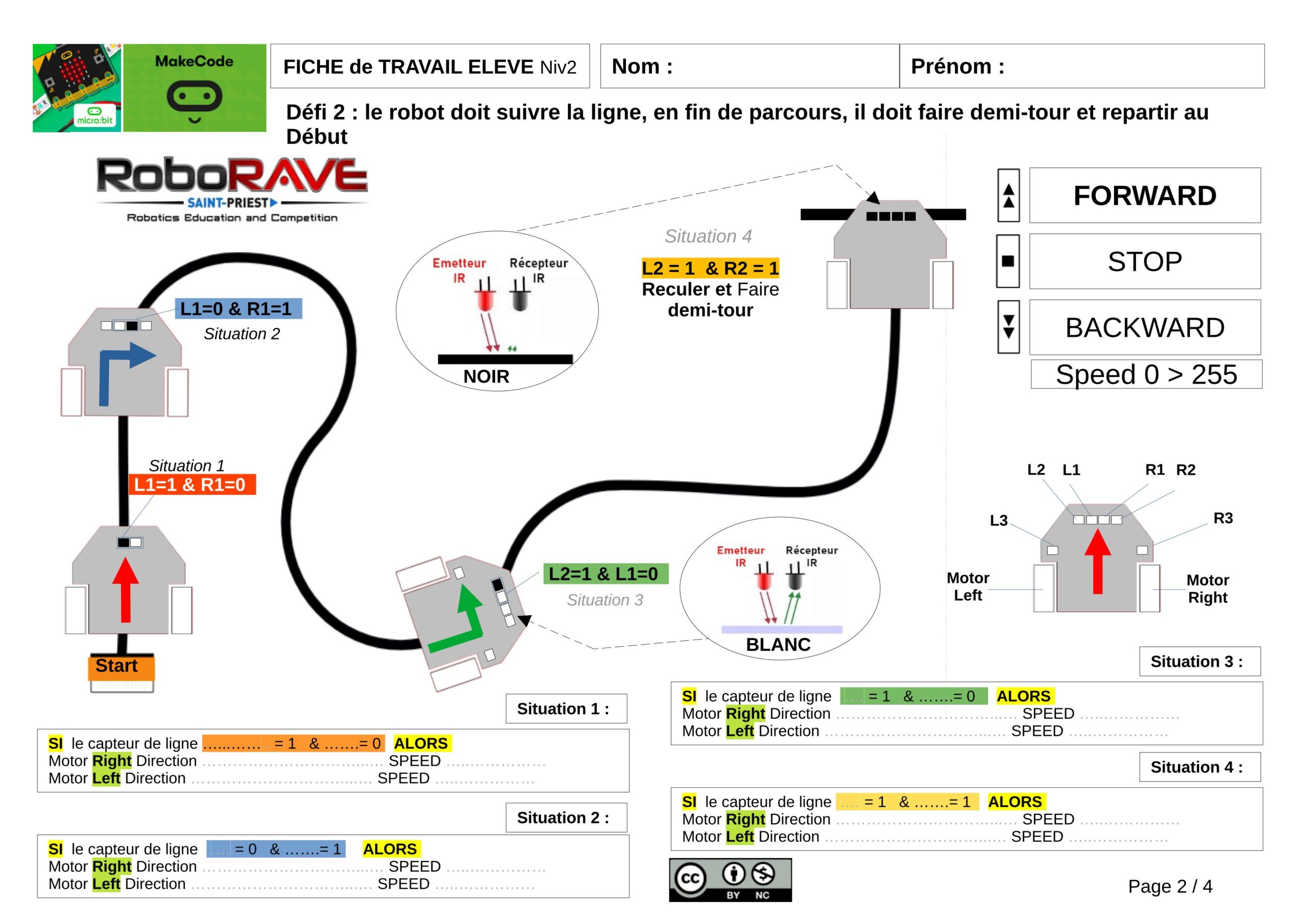
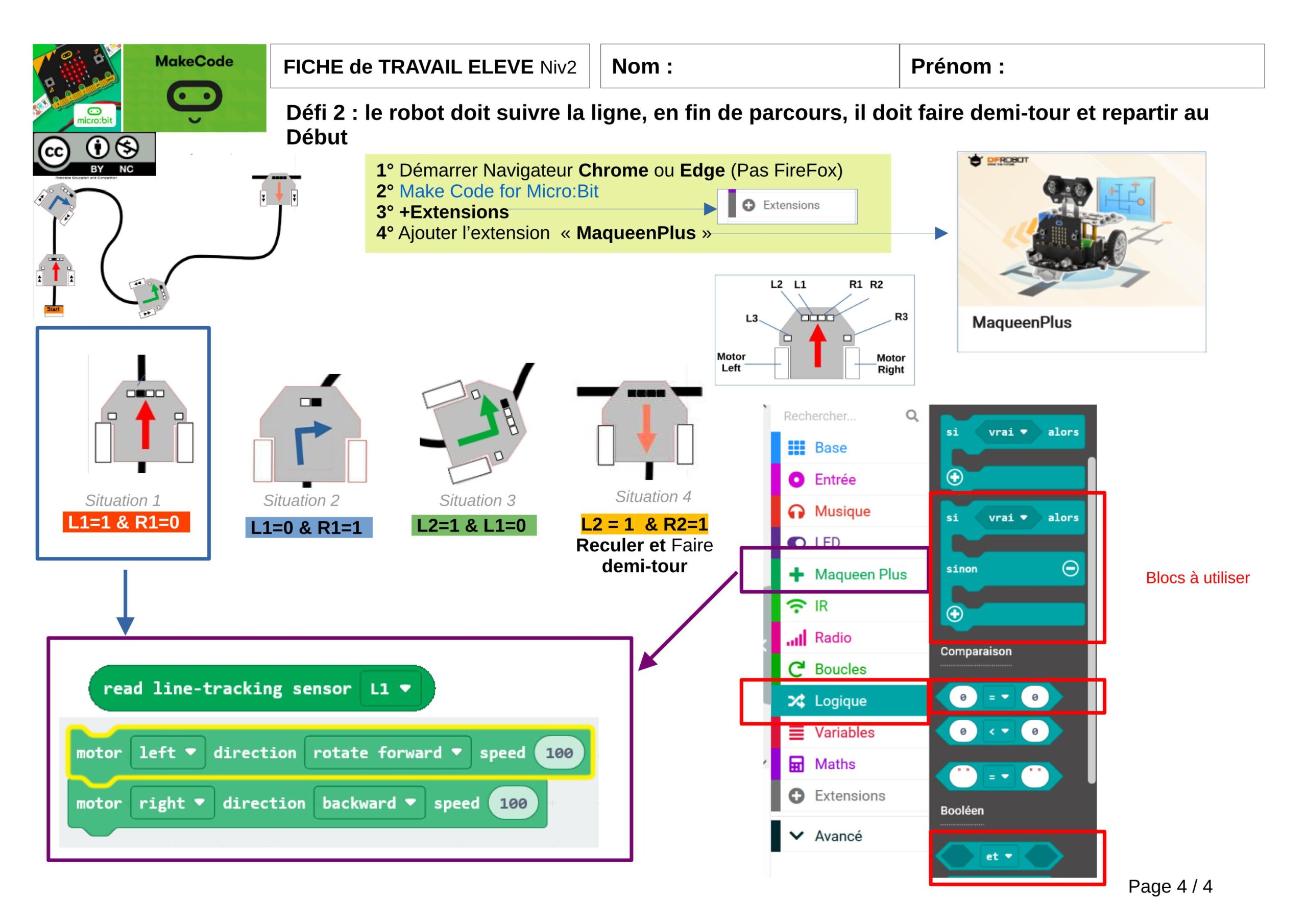
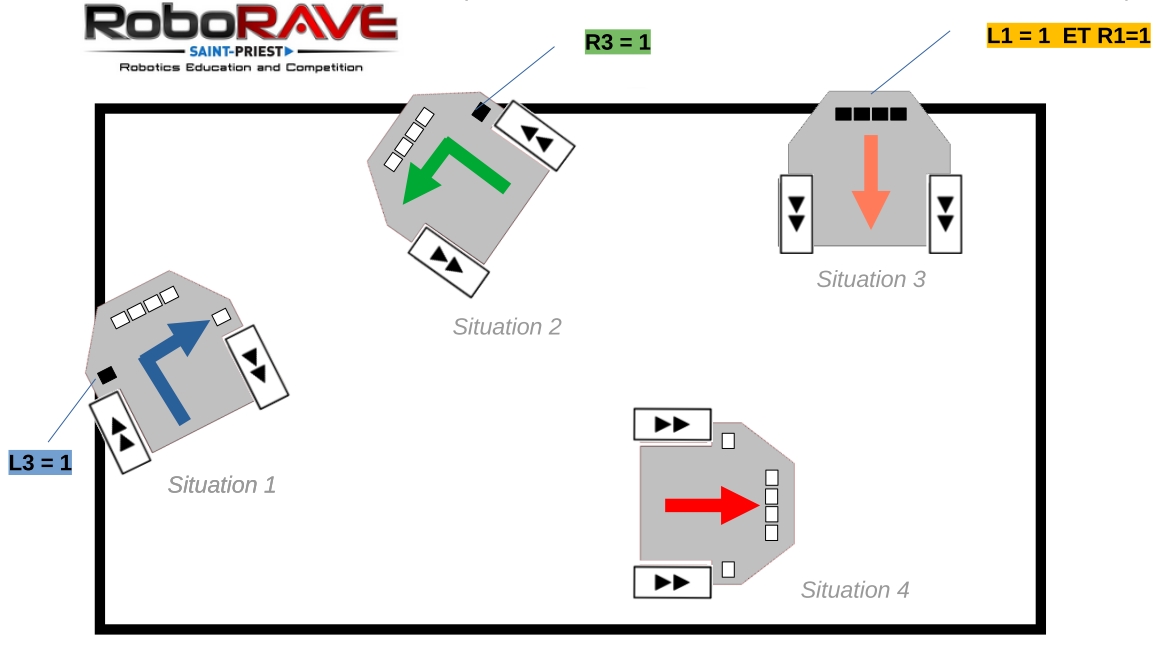
Défi 3 : programmer un robot suiveur de ligne
Objectifs de l’activité 3 : > en s’aidant des fiches de l’activité 1 : programmer un suivi de ligne > identifier les conditions qui vont déclencher les changement de direction du robots
> programmer le fonctionnement du suivi de ligne à l’aide du programme incomplet fournit par le professeur
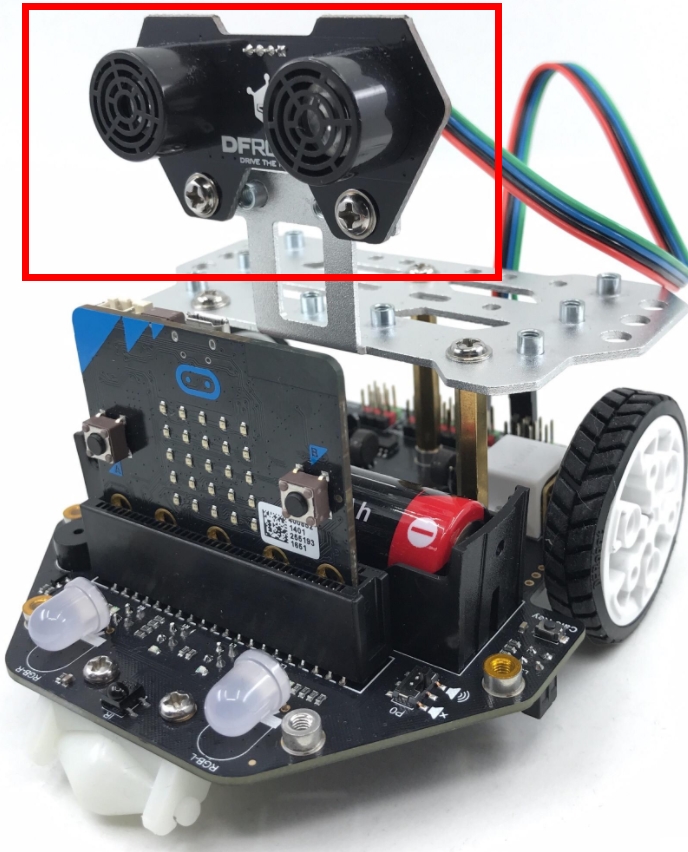
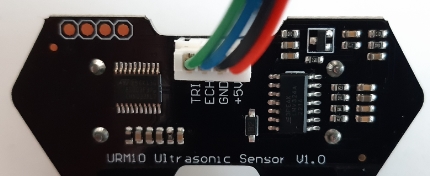
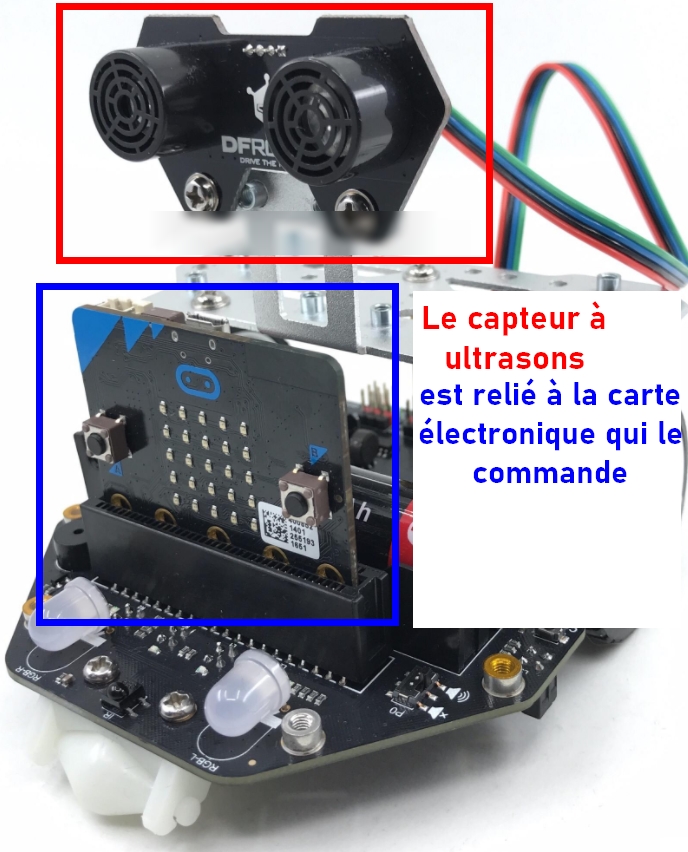
La détection des obstacles utilise un capteur à ultrasons URM10 de DFRobot. Le module ultrason est constitué d’un émetteur d’ultrasons & d’un récepteur d’ultrasons
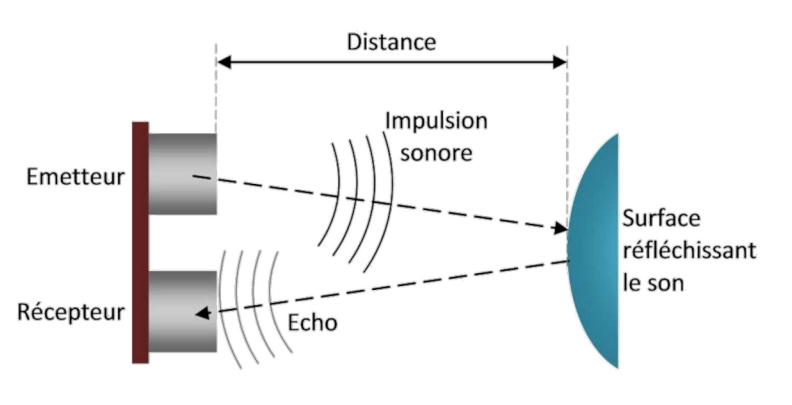
Principe de fonctionnement
Un court signal sonore est envoyé (inaudible car dans le domaine des ultrasons -~ 40 Khz) • Le son est réfléchi par une surface et repart en direction du capteur. • Ce dernier le détecte une fois revenu à son point de départ.
La durée entre l’instant de l’émission et l’instant de la réception peut être mesurée. Le signal ayant parcouru 2 fois la distance entre le capteur et la surface (un aller-retour) , on peut la calculer ainsi : distance = (vitesse du son / 2) X durée. La vitesse du son est environ égale à 340 m/s à température ambiante.
La vitesse du son est environ égale à 340 m/s à température ambiante
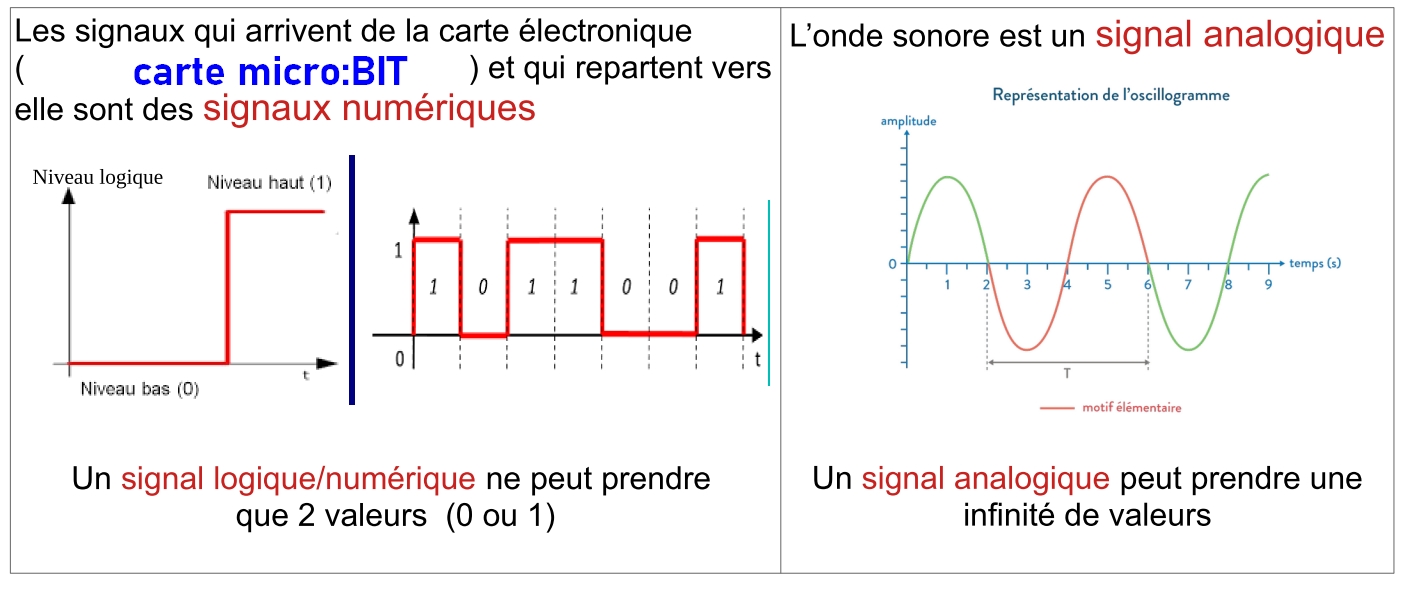
Nature des signaux
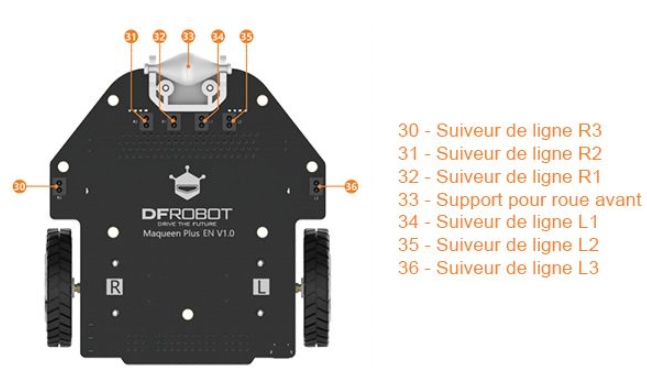
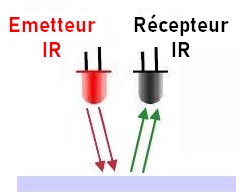
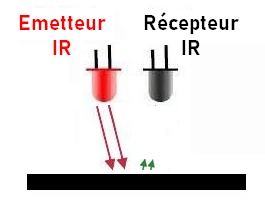
Principe de fonctionnement du capteur de suivi de ligne
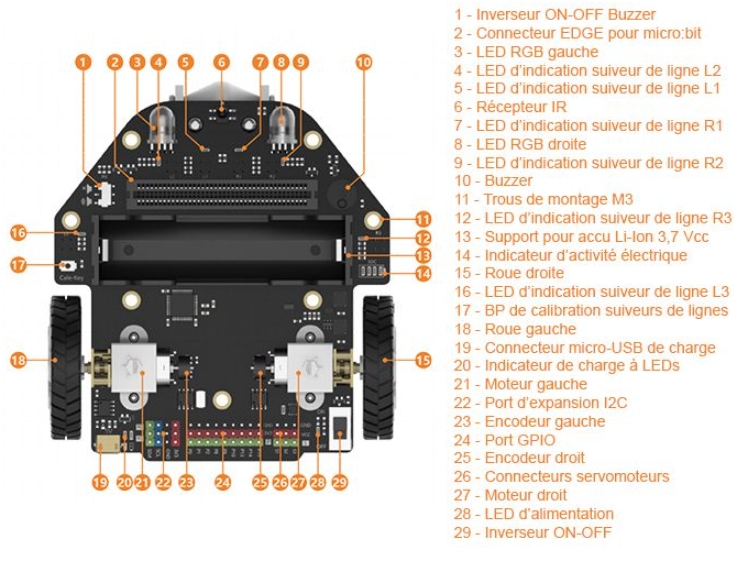
Principe de fonctionnement : > Maqueen plus dispose de 6 capteurs de suivi de ligne > chaque capteur dispose d’un émetteur et d’un récepteur InfraRouge (IR).
Le capteur de type émetteur-Récepteur fonctionne sur le principe de la réflexion de lumière par les surface claires. Surface Claire : Signal = 0 Surface sombre : Signal = 1
Activités de découverte et d'initiation à la Robotique Educative
Programmation graphique avec ED Scratch
Se connecter au logiciel de programmation ED Scratch (en ligne) : cliquez ci-dessous
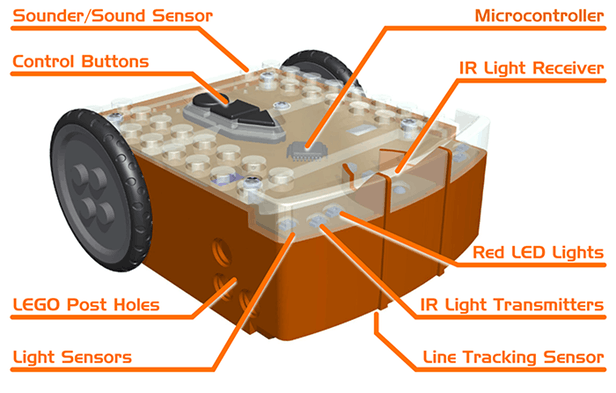
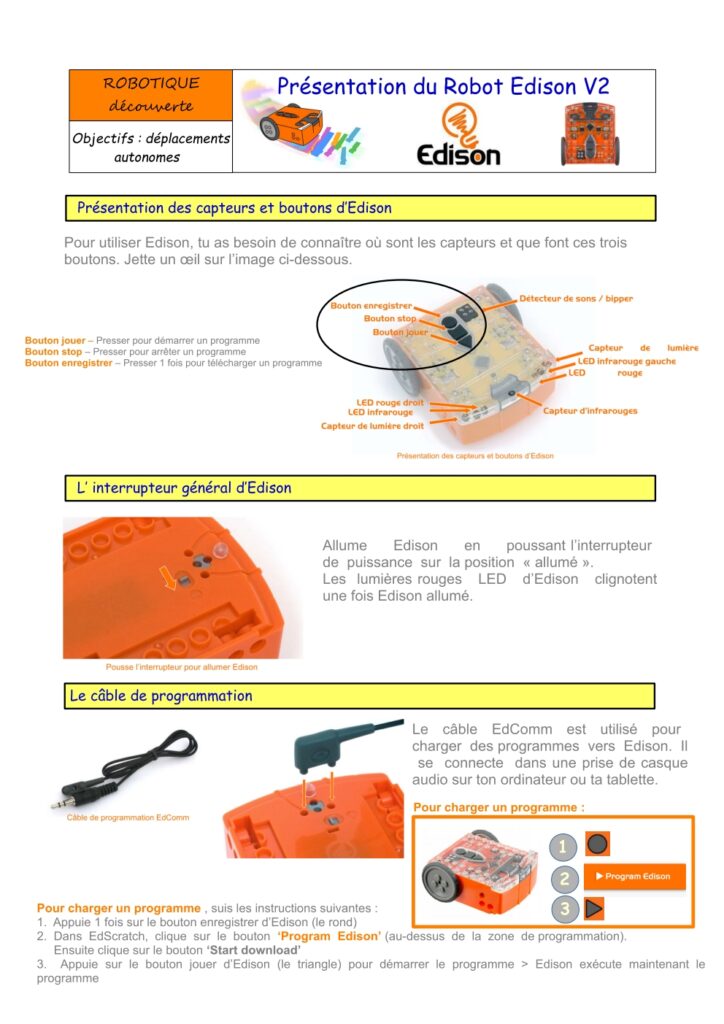
Le robot Edison V2.0 est idéal pour découvrir et s’initier à la robotique de programmation dès l’école élémentaire. De nombreux capteurs sont intégrés et font du Edison V2.0 un robot fiable et précis :
ACTIVITE 1 : découverte du mini Robot EDISON V2
1- Fiche de découverte du Robot Edison V2.0 et de son logiciel de programmation ED Scratch (Logiciel en ligne )