Réaliser une modélisation 3D avec un modèle paramétrique > Comprendre l'essentiel
La modélisation paramétrique est un processus de conception qui consiste à modifier les paramètres d'un objet afin d'en générer une modélisation 3D personnalisée.
Plus besoin de dessiner l'objet en 3D, on utilise un modèle générique que l'on va paramétrer
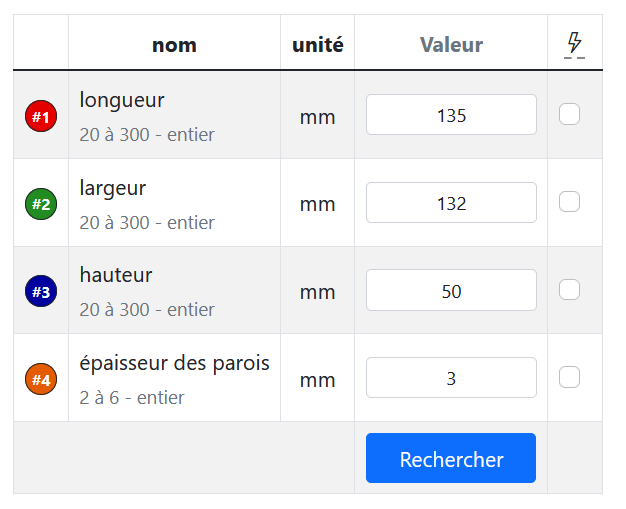
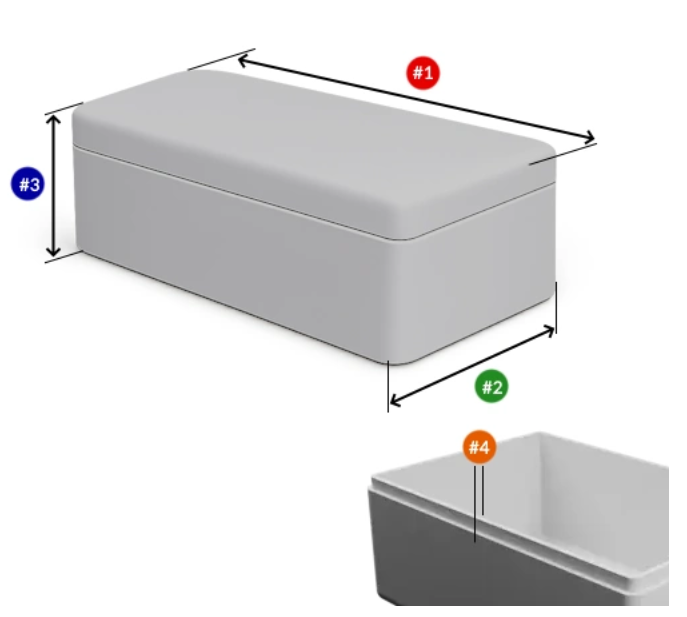
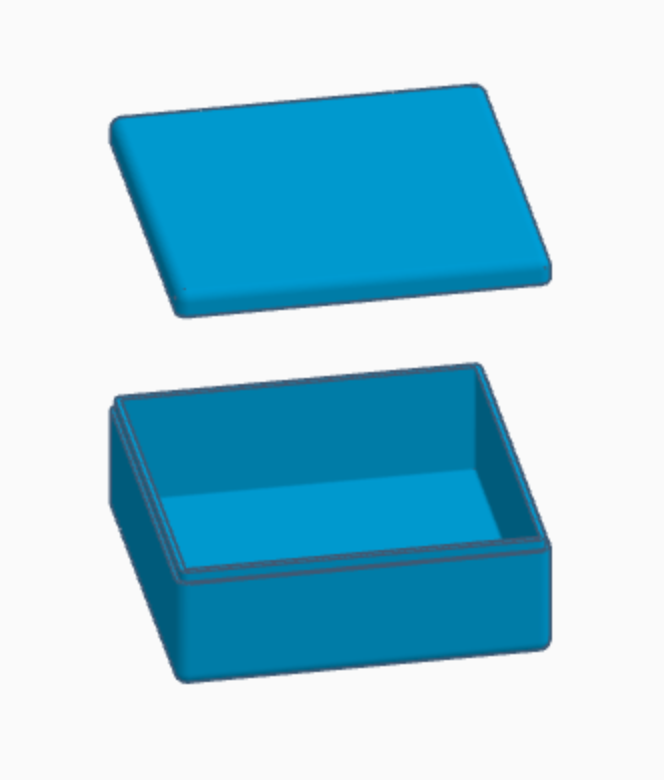
TRAVAIL A FAIRE : partie 1 > Se connecter à l’application en ligne et générer une « boîte avec couvercle » dimensions extérieur 135 X 132 X 50 mm – épaisseur de parois = 3 mm. > télécharger le fichier 3D (compressé) et le décompresser > Faire le travail partie 2 (voir plus bas)
modèle paramétrique en ligne
définir les dimensions personnalisées
le modèle 3D est généré
Vous allez ensuite simplement télécharger le (ou les ) fichiers 3D au format .STL pour ensuite les fabriquer en impression 3D ou bien les importer dans le logiciel en ligne Tinkercad afin de finaliser les dernières formes du boîtier : c'est ce que vous devez faire dans cette activité
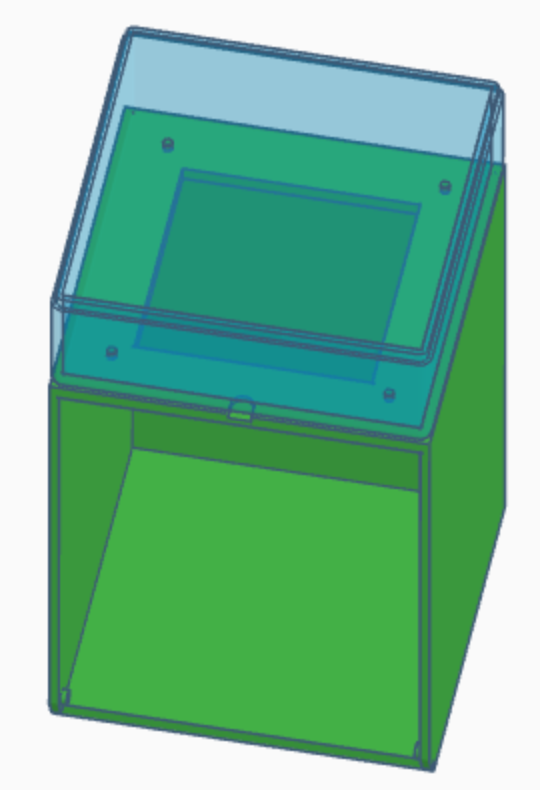
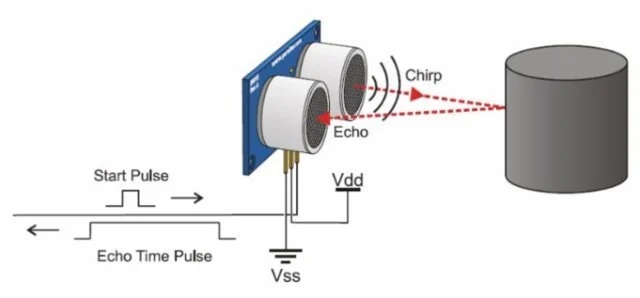
TRAVAIL A FAIRE : partie 2 – Se connecter au logiciel en ligne de conception 3D Tinkercad (de sa classe) – Importer les objets 3D (boîte + couvercle) que vous avez généré – Terminer la conception du boîtier en réalisant les opérations décrites ci-dessous : > étapes 1 à 8 : percer 4 trous de fixation dans le fond de la boîte bleu obtenue précédemment > étapes 9 à 13 : utiliser la modélisation 3D du capteur de distance HCSR04 (émetteur-récepteur à Ultrasons) pour percer les 2 trous permettant la mise en place du capteur dans le fond de la boîte bleu.
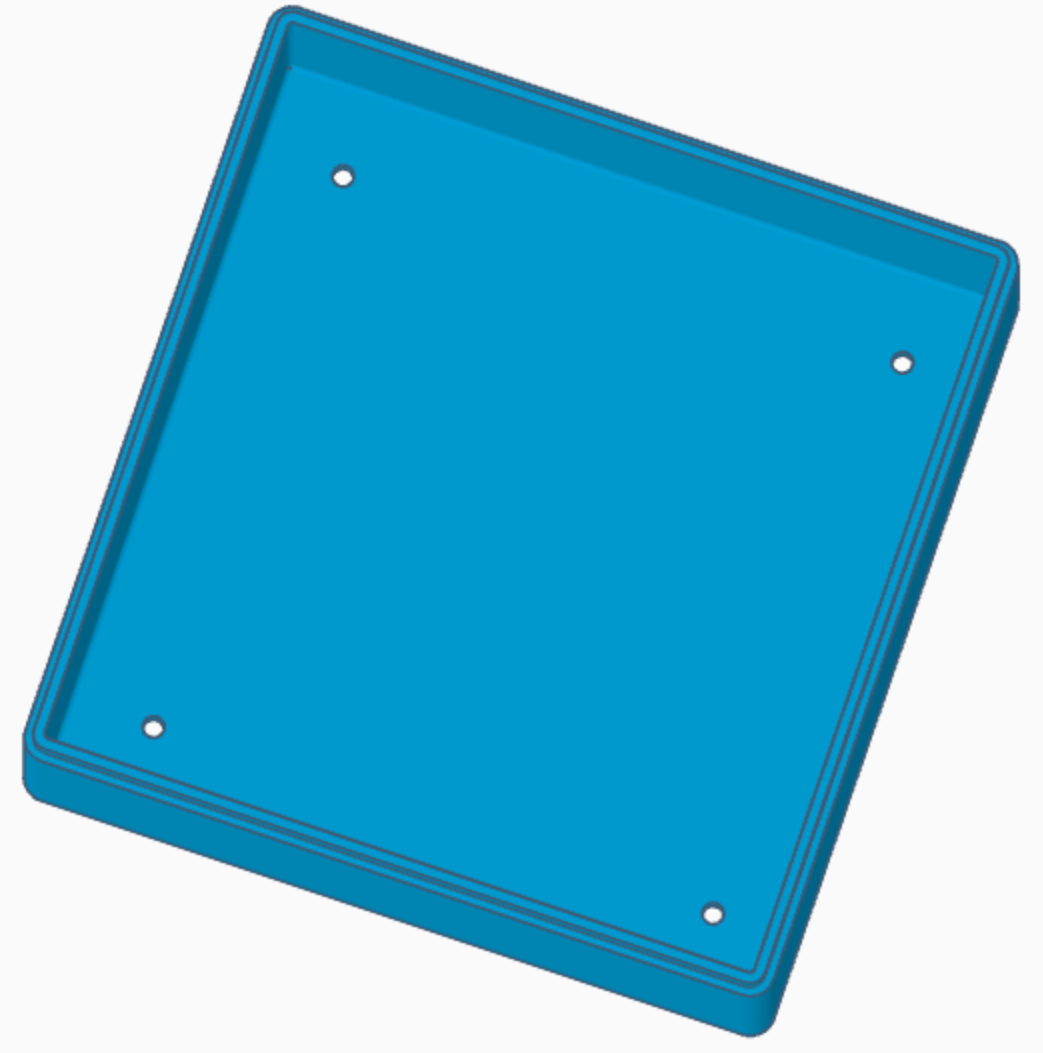
étapes 1 à 8 : perçage par enlèvement de matière (soustraction de matière)
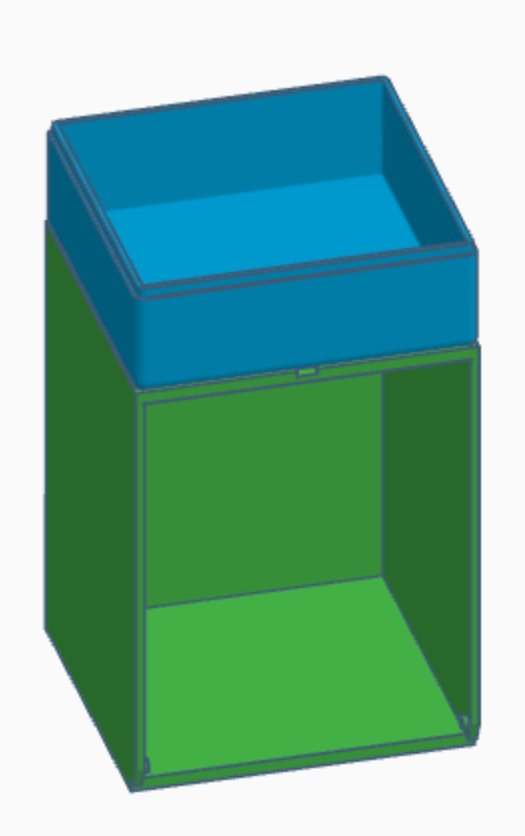
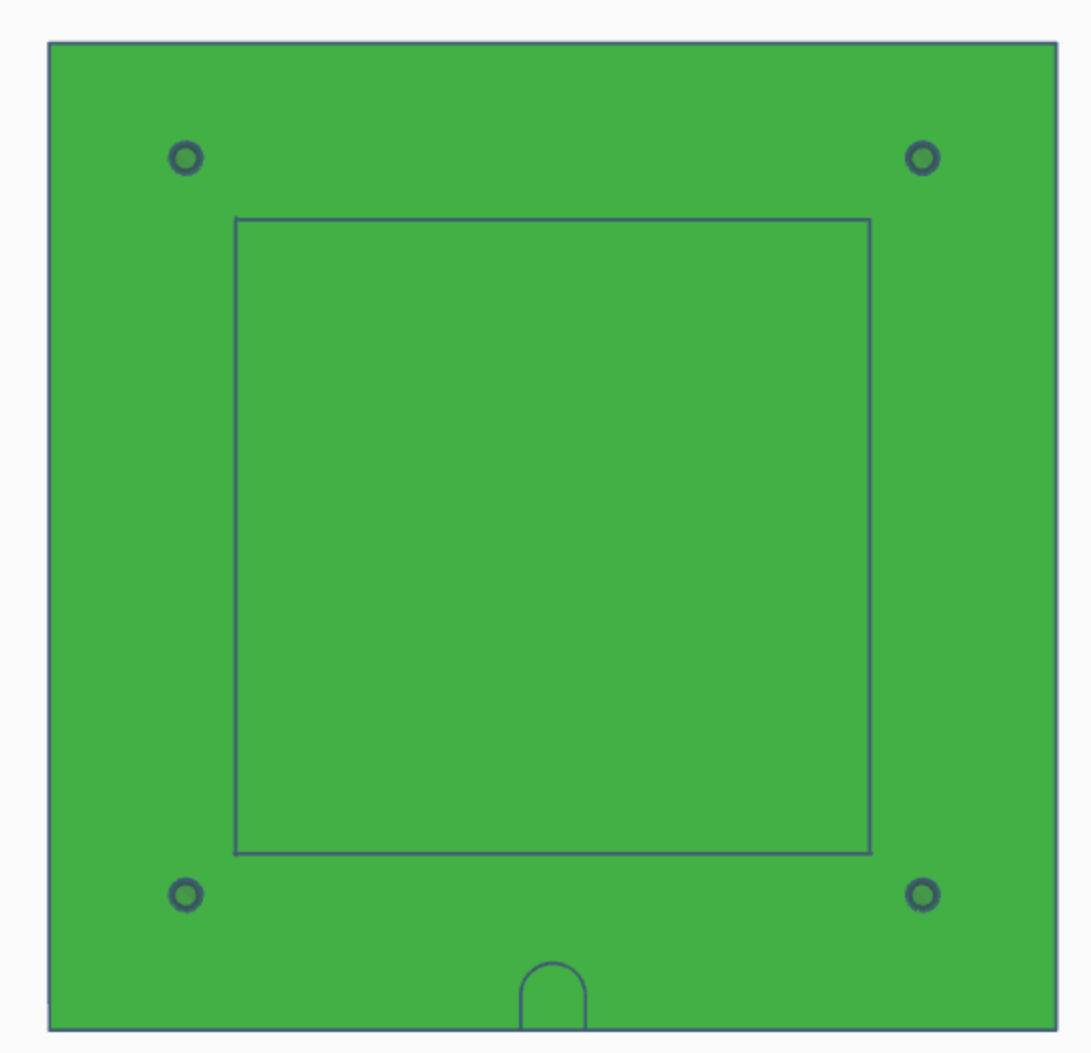
1- Placer la boite au dessus du corps de la poubelle, aligner sur les 2 axes Longueur et largeur. 2- masquer la boite bleu
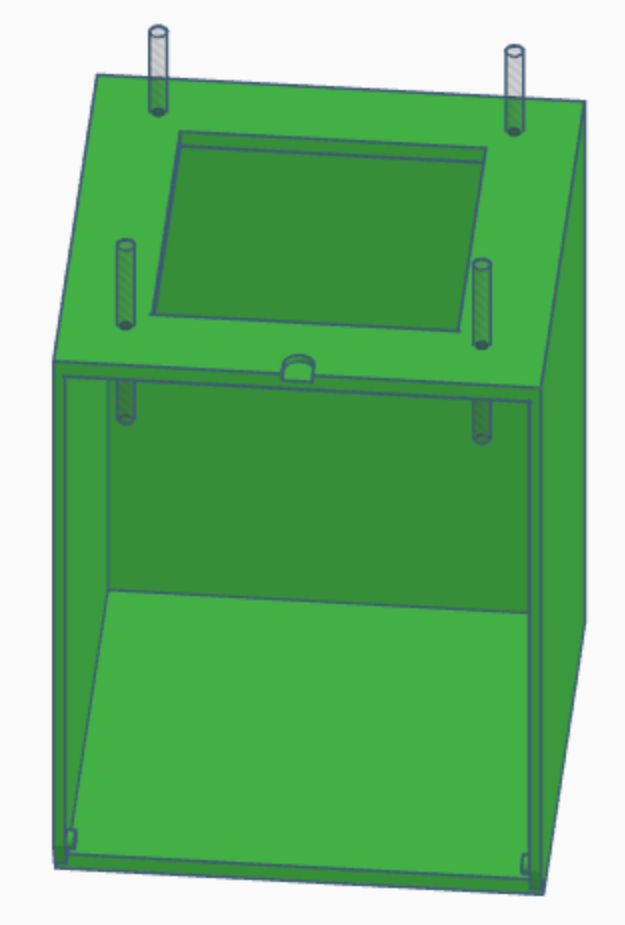
3- Zoomer et placer 4 cylindres diamètre 4 mm et de longueur environ 60 mm (volume de perçage = matière à enlever)
4 – Placer les 4 cylindres de façon à traverser la matière verte (corps de la poubelle).
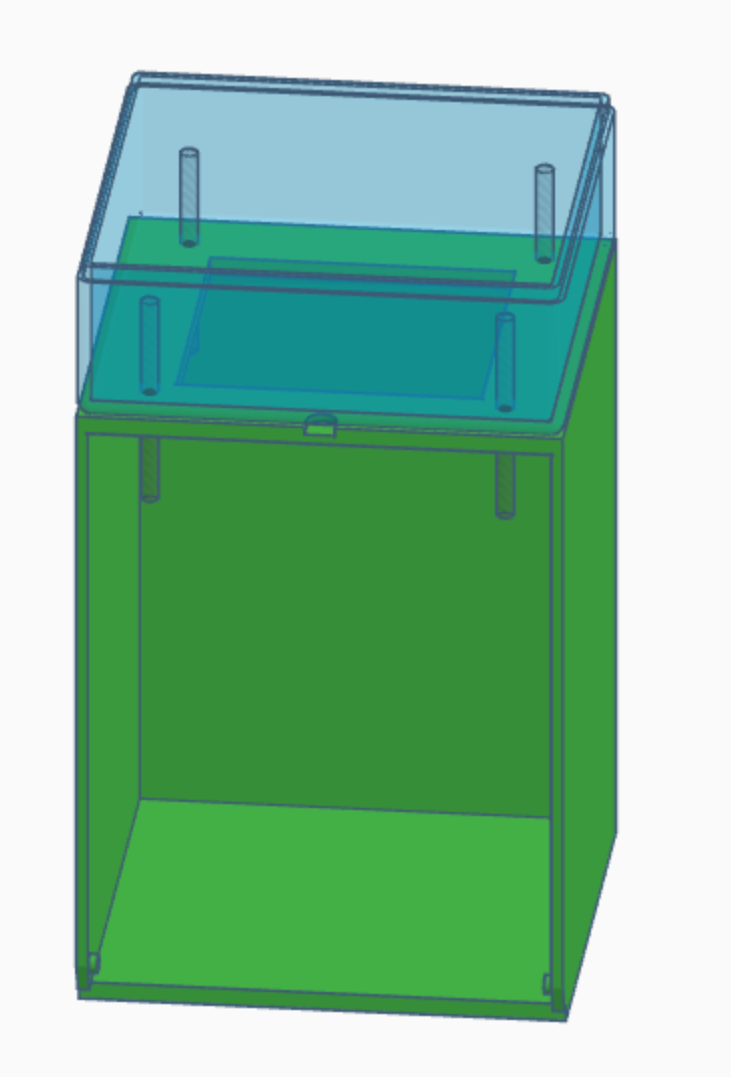
5- Montrer la boîte qui avait été précédemment cachée et vérifier le bon alignement des éléments
6- Masquer le corps de la poubelle (pièce verte)
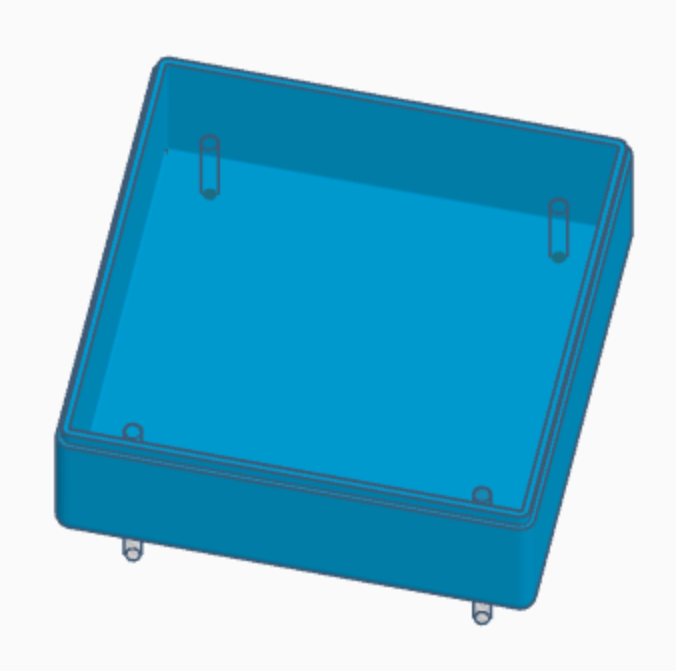
7- Sélectionner l’ensemble des éléments : boîte + 4 cylindres et « regrouper en union » afin de réaliser l’opération de soustraction de matière (perçage des 4 trous)
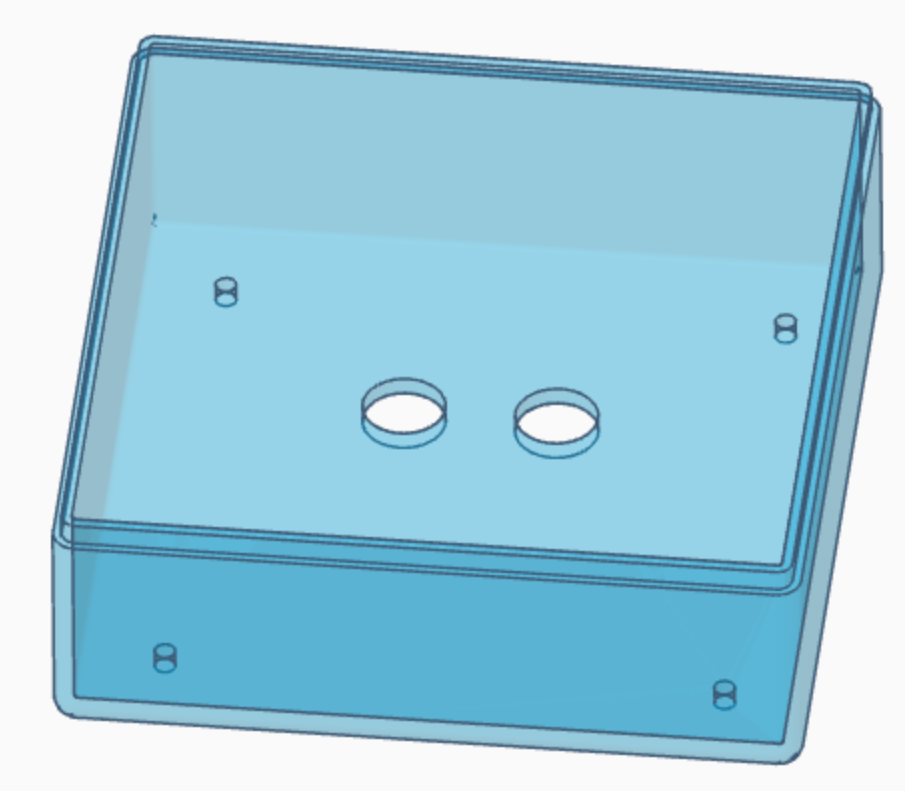
8- Les perçages sont maintenant réalisés….Montrer l’ensemble des pièces cachées pour vérifier le rendu final
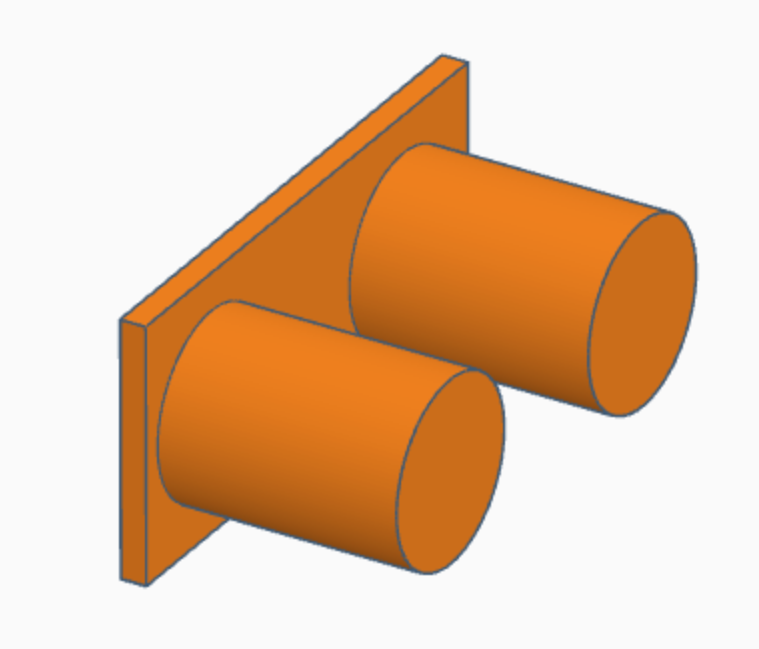
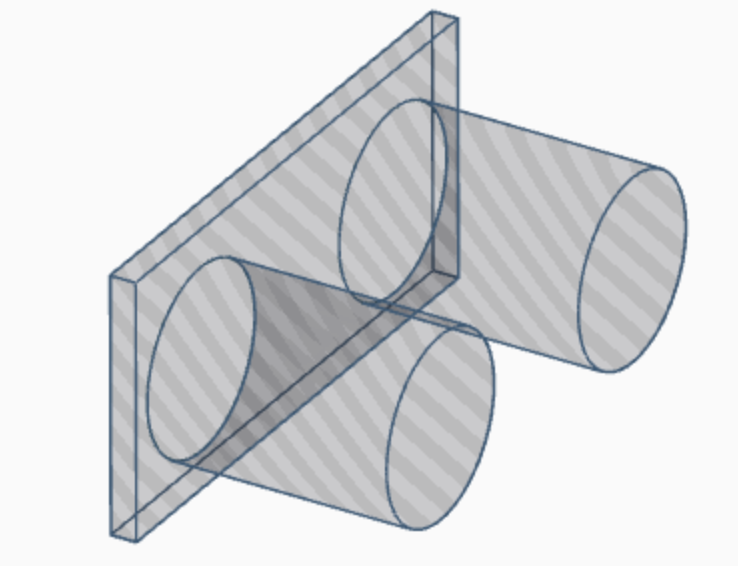
étapes 9 à 13 : façonner un enlèvement de matière pour le capteur HCSR04
capteur de distance HC-SR04
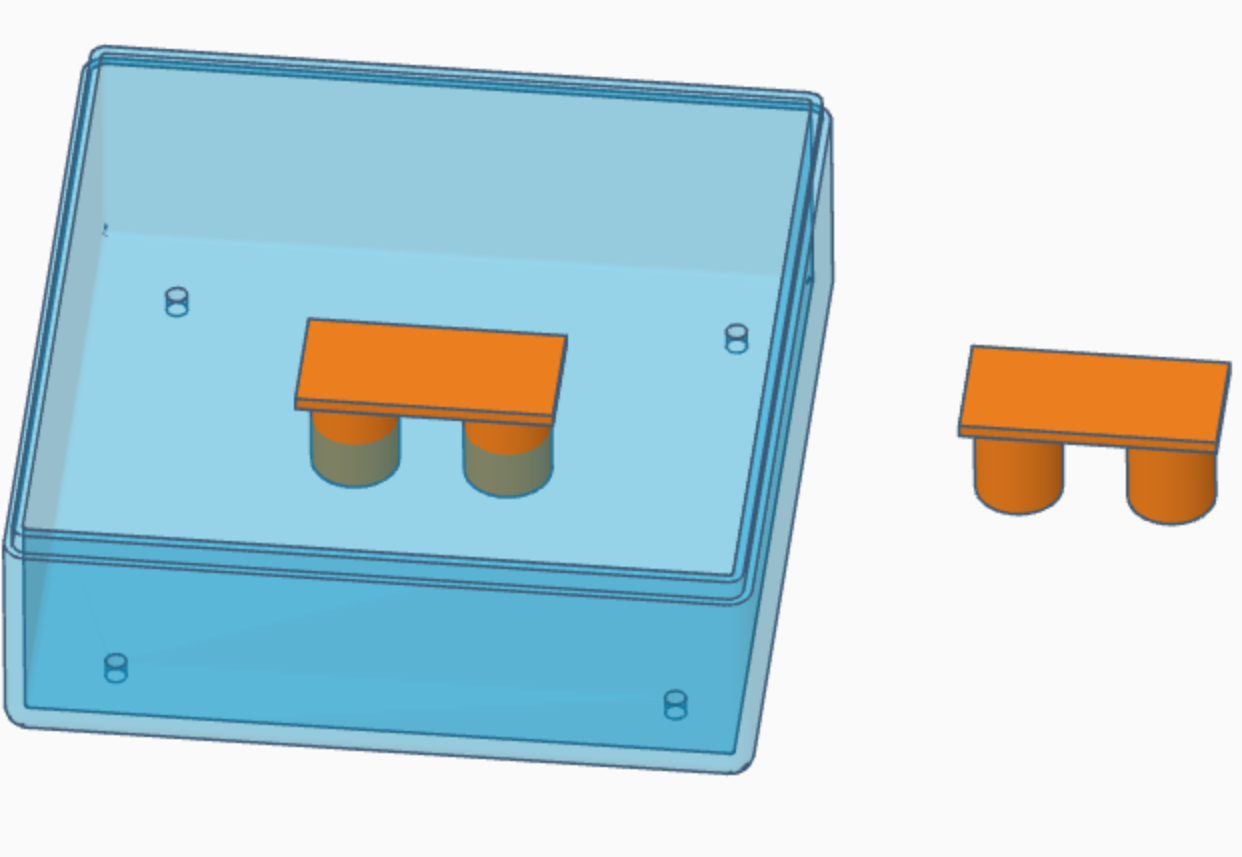
Modélisation 3D du capteur (solide)
Modélisation 3D du capteur (perçage)
9- Placer la modélisation du capteur HCSR04 dans le fond de la boîte et centré
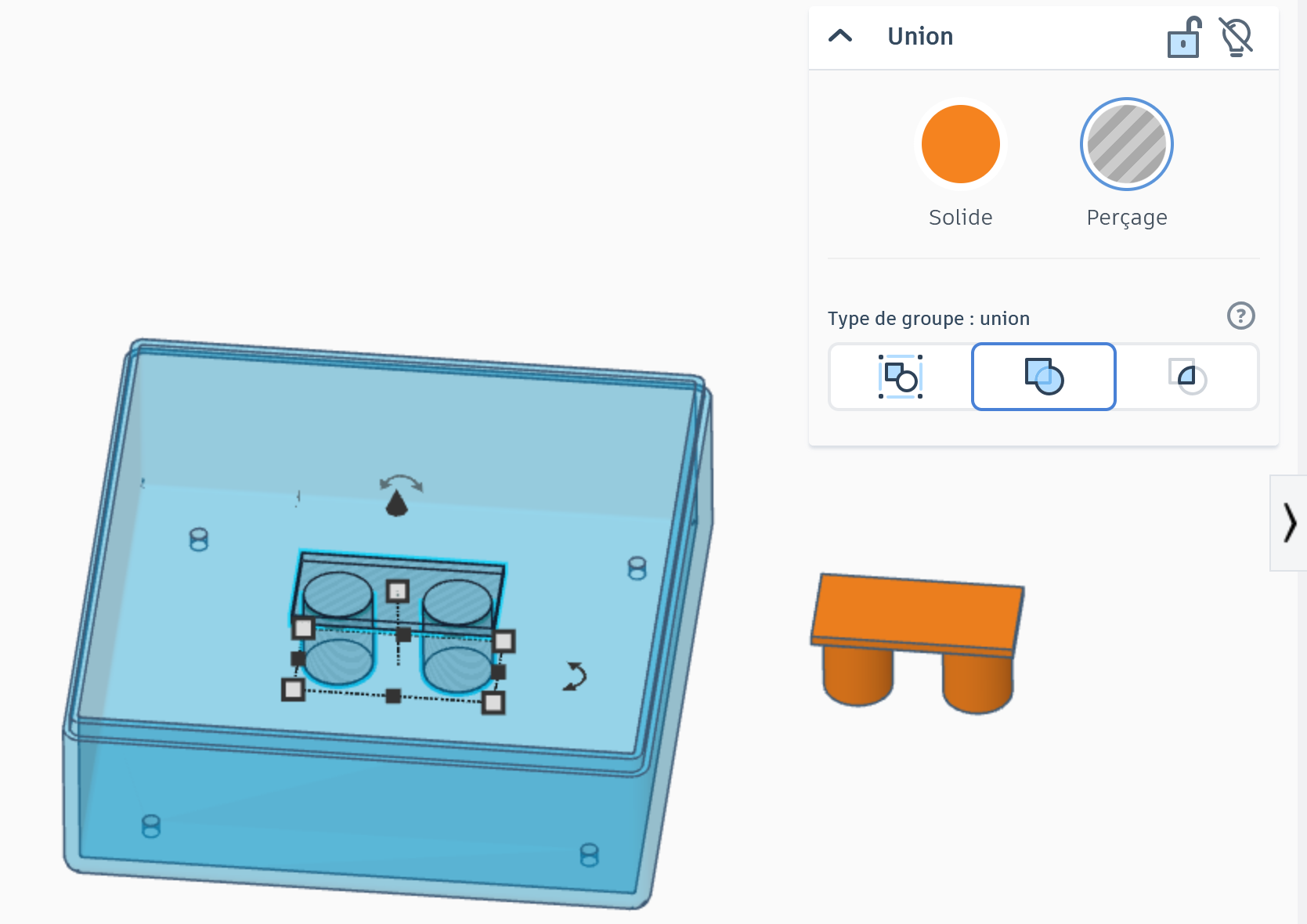
10- Transformer l’aspect du solide (orange) en perçage (hachuré transparent).
11- Regrouper en Union afin de finaliser l’enlèvement (soustraction) de matière