Activités de découverte et d'initiation à la Robotique Educative
> Comprendre les déplacements d'un robots mobile (2 roues) > Programmer des détecteurs de lignes (capteurs Infra rouges) > programmer les déplacements du Robot à travers des défis
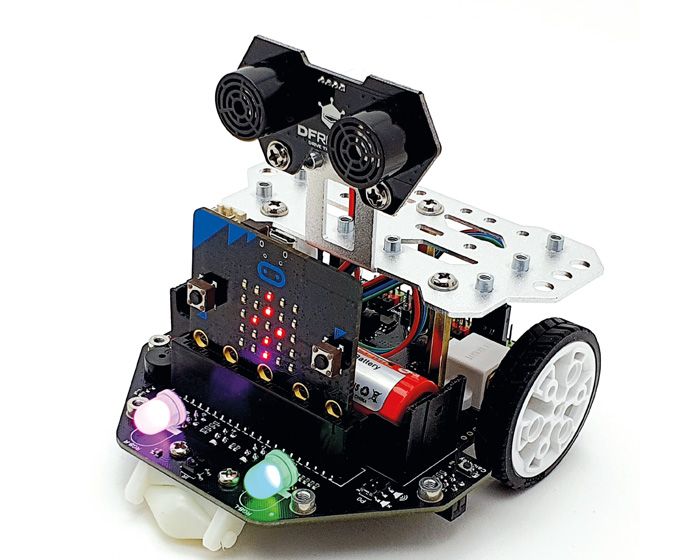
Découverte du Robot Maqueen Plus V1.0
Cliquez ci-dessus pour se Connecter à Make Code en ligne
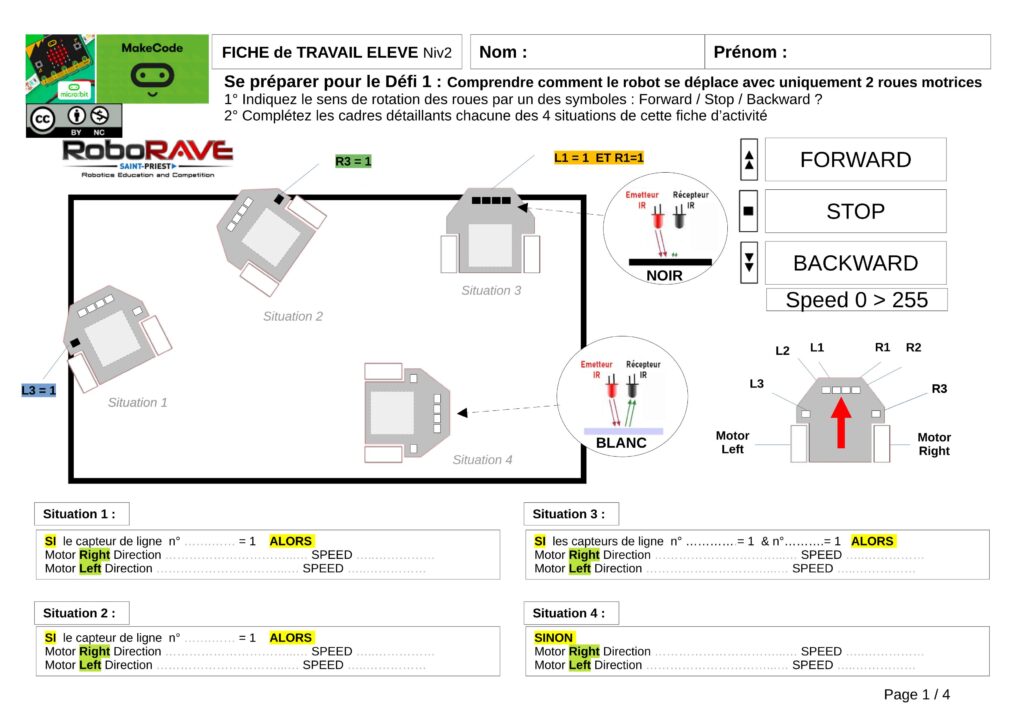
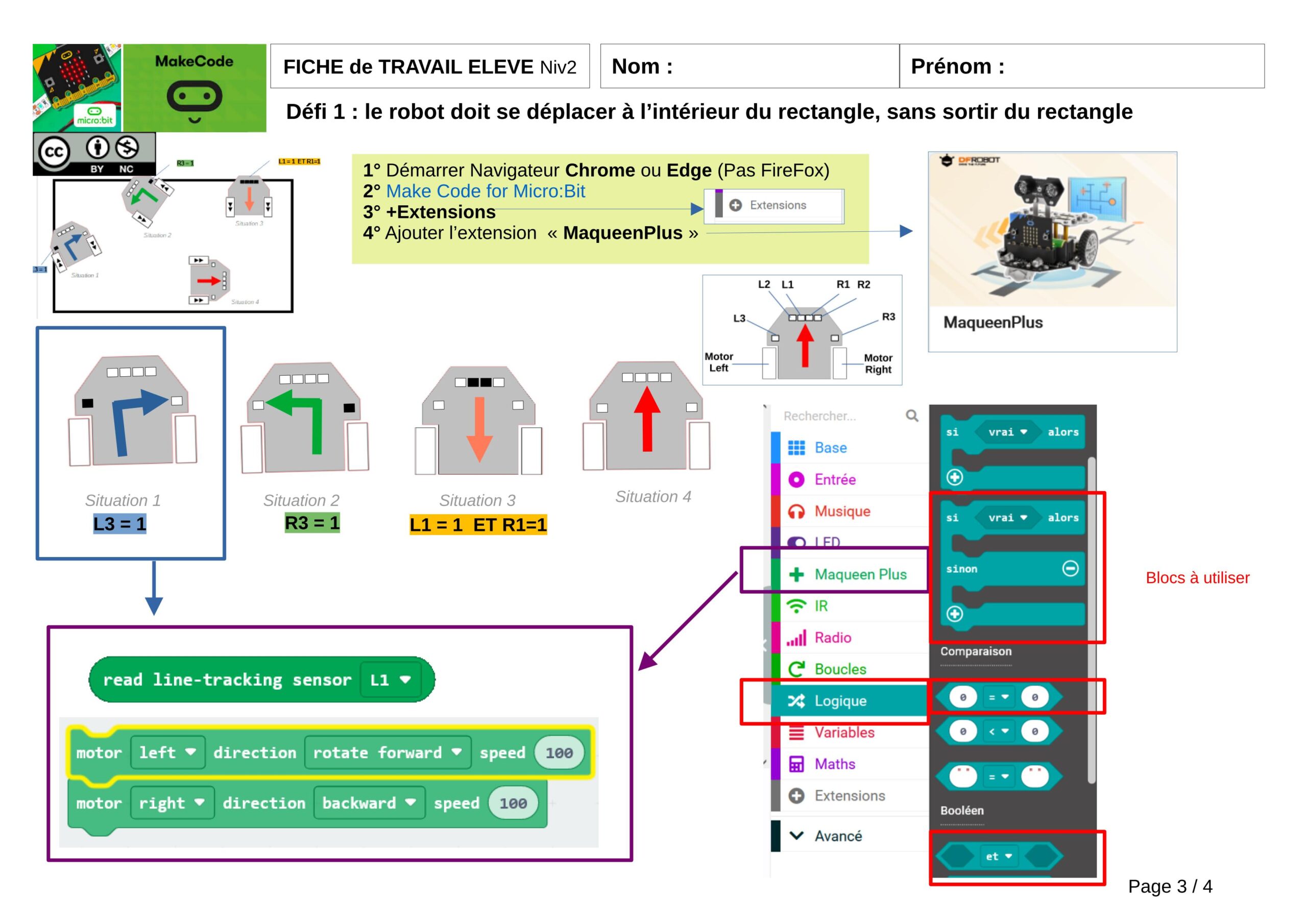
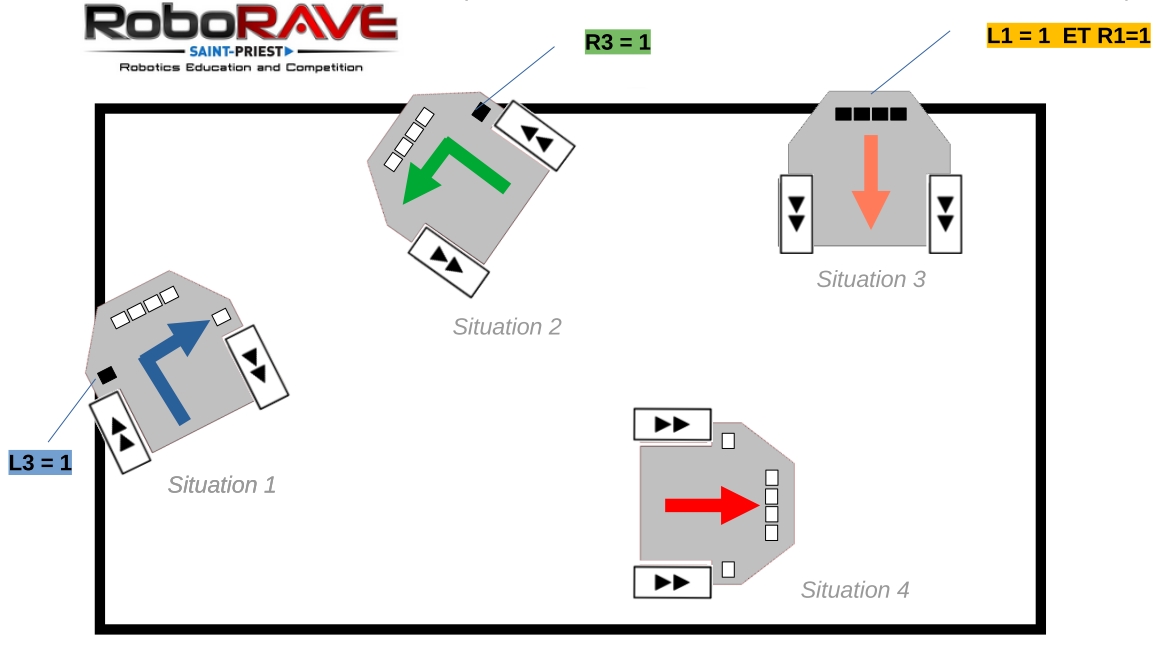
Objectifs de l’activité 2 : > programmer les déplacements du Robot > le robot doit se déplacer à l’intérieur du rectangle blanc à bords noirs > le robot ne doit pas sortir du rectangle
> le robot doit changer de direction afin de ne jamais sortir du rectangle
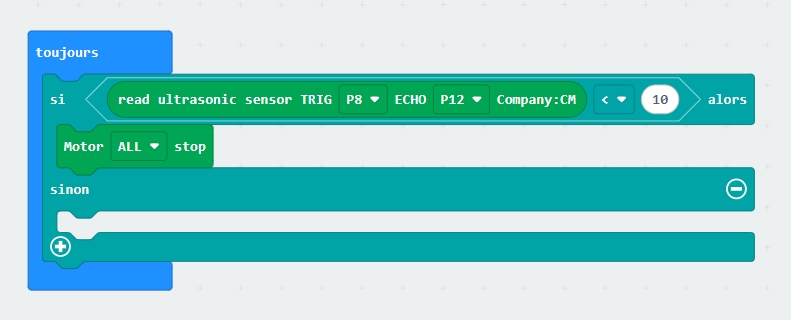
SI la distance est inférieur à 10 com ALORS
Arrêter le Robot
SINON se déplacer dans le rectangle
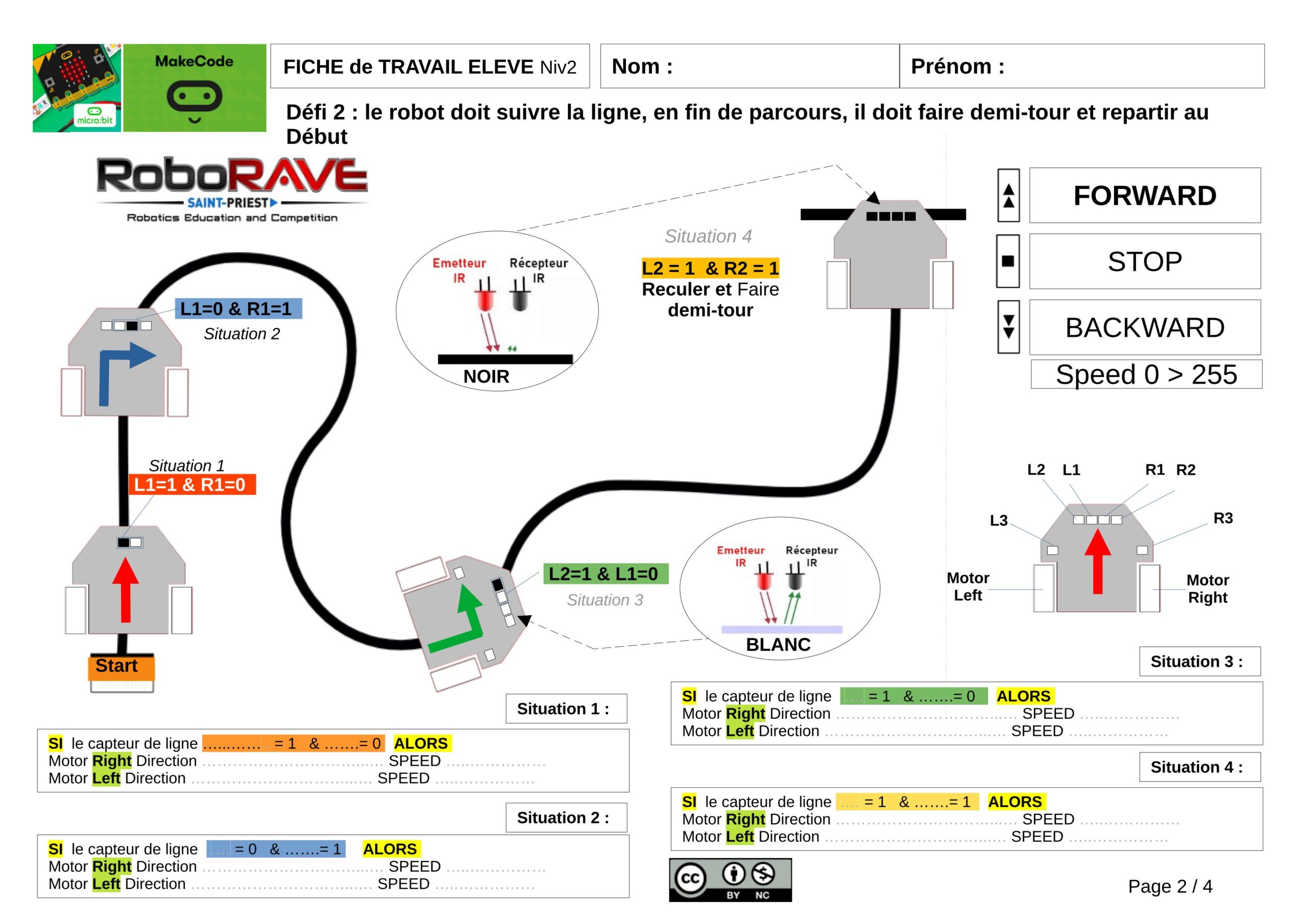
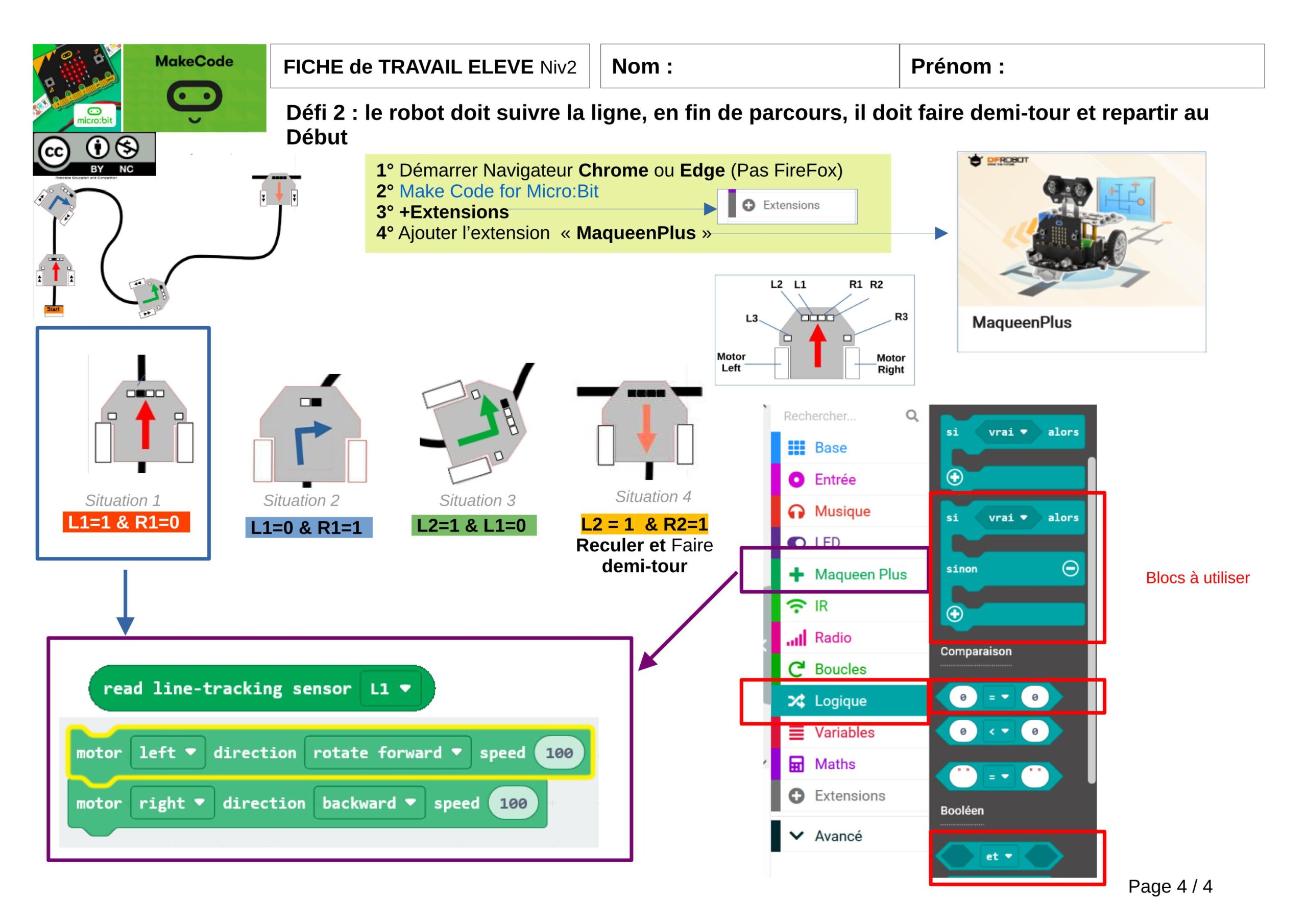
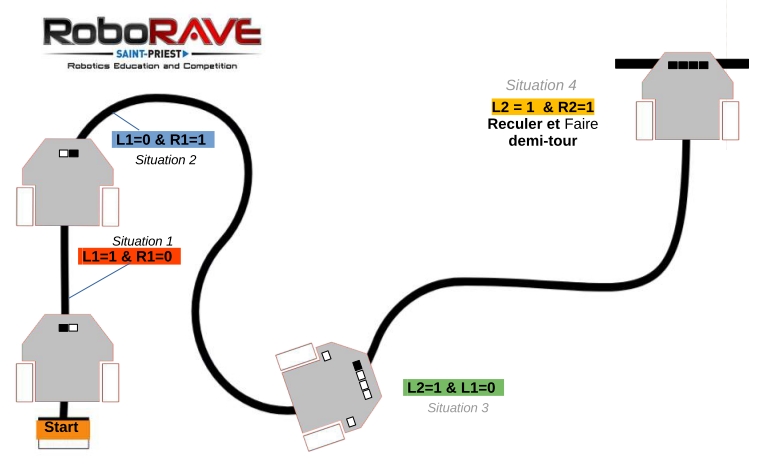
Défi 3 : programmer un robot suiveur de ligne
Objectifs de l’activité 3 : > en s’aidant des fiches de l’activité 1 : programmer un suivi de ligne > identifier les conditions qui vont déclencher les changement de direction du robots
> programmer le fonctionnement du suivi de ligne à l’aide du programme incomplet fournit par le professeur
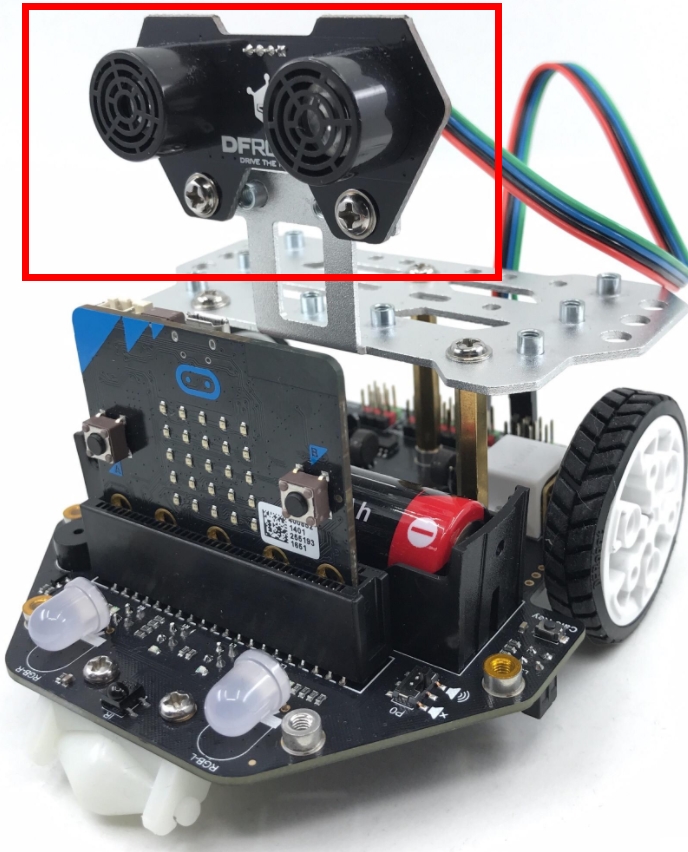
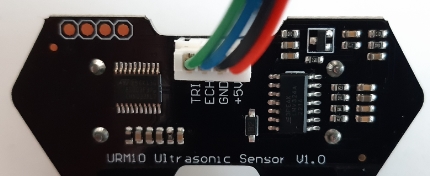
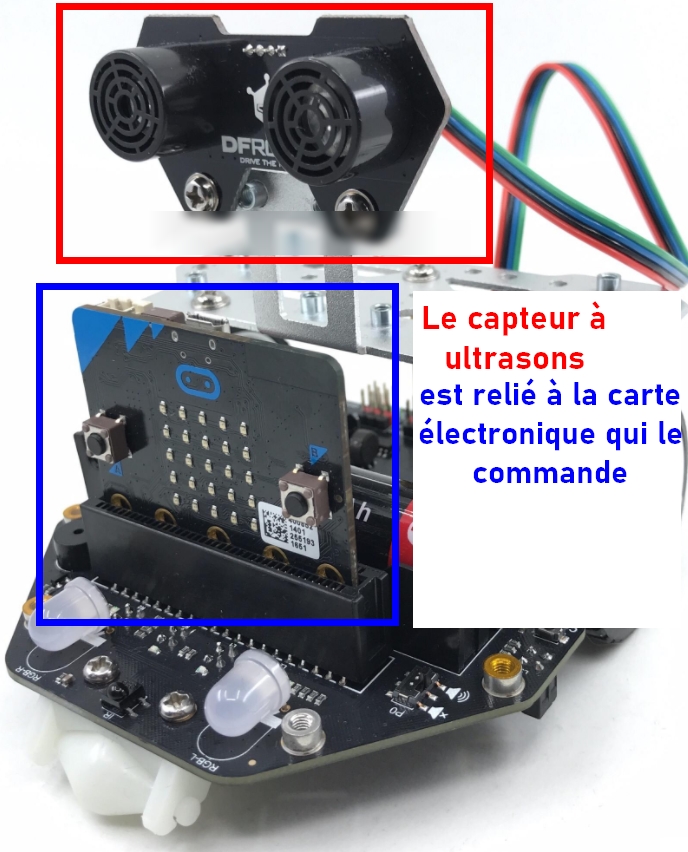
La détection des obstacles utilise un capteur à ultrasons URM10 de DFRobot. Le module ultrason est constitué d’un émetteur d’ultrasons & d’un récepteur d’ultrasons
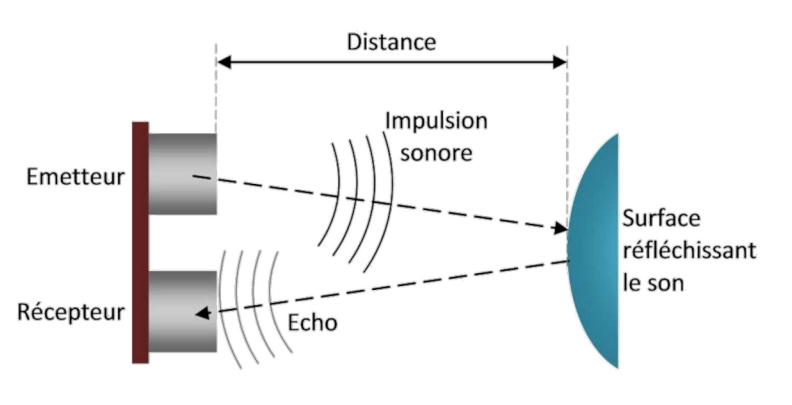
Principe de fonctionnement
Un court signal sonore est envoyé (inaudible car dans le domaine des ultrasons -~ 40 Khz) • Le son est réfléchi par une surface et repart en direction du capteur. • Ce dernier le détecte une fois revenu à son point de départ.
La durée entre l’instant de l’émission et l’instant de la réception peut être mesurée. Le signal ayant parcouru 2 fois la distance entre le capteur et la surface (un aller-retour) , on peut la calculer ainsi : distance = (vitesse du son / 2) X durée. La vitesse du son est environ égale à 340 m/s à température ambiante.
La vitesse du son est environ égale à 340 m/s à température ambiante
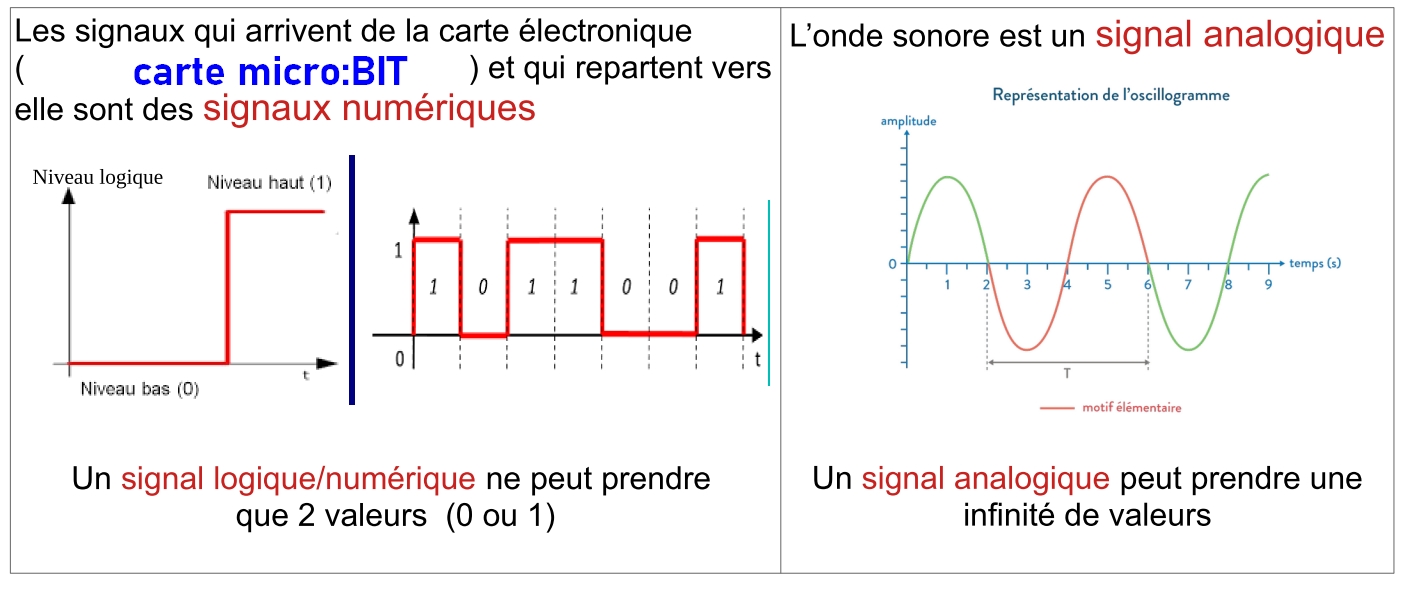
Nature des signaux
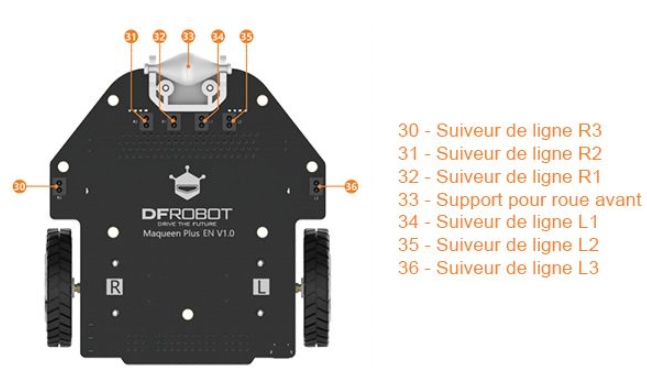
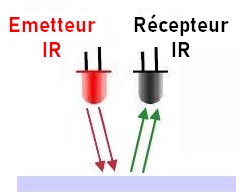
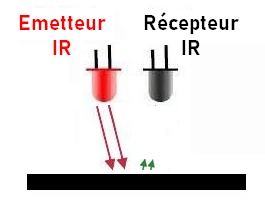
Principe de fonctionnement du capteur de suivi de ligne
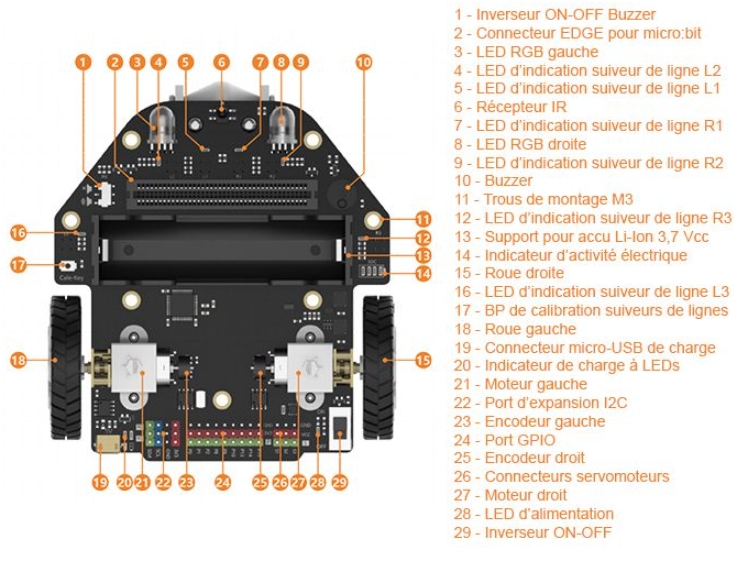
Principe de fonctionnement : > Maqueen plus dispose de 6 capteurs de suivi de ligne > chaque capteur dispose d’un émetteur et d’un récepteur InfraRouge (IR).
Le capteur de type émetteur-Récepteur fonctionne sur le principe de la réflexion de lumière par les surface claires. Surface Claire : Signal = 0 Surface sombre : Signal = 1