Votre robot est programmé, vous devez maintenant optimiser son fonctionnement
Si un moteur ne tourne pas du tout ?
> Vérifier l’état des piles
> Vérifiez la bonne connexion des fils électriques
> Recommencez le transfert du programme vers la carte Arduino.
> Si le moteur émet un bruit de sifflement et ne tourne pas = tension d’alimentation trop faible (Agmenter la vitesse ou augmenter la tension d’alimentation)
- Le robot tourne sur lui même ou va en arrière
(au lieu de l'avant)
Si le robot tourne sur lui même
> inverser le sens de branchement d’un moteur
Si le robot recule au lieu d’avancer
> Inverser le sens de branchement des 2 moteurs
Le robot avance trop vite ?
Si le robot avance trop vite il est difficile à contrôle
Diminuer les vitesses du/ ou des moteurs concernés jusqu’à obtenir une allure adaptée à l’utilisation du robot
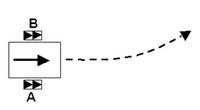
Le Robot Avance mais dérive à Gauche
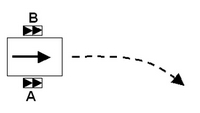
Le Robot Avance mais dérive à Droite
Pensez à Commenter votre Programme
Diminuer la vitesse du Moteur A
OU
Agmenter la vitesse du Moteur B
Attention :
vitesse moteur trop faible = moteur ne tourne pas
Vitesse moteur trop élevée = Robot incontrôlable
Diminuer la vitesse du Moteur B
OU
Agmenter la vitesse du Moteur A
Attention :
vitesse moteur trop faible = moteur ne tourne pas
Vitesse moteur trop élevée = Robot incontrôlable
Attention : Après chaque modification du programme Ardublock, il faut connecter la carte Arduino sur l’ordinateur (avec le câble USB ) et transférer le nouveau programme modifié…...
Dès que votre Robot avance à vitesse adaptée et à peu près droit vous pouvez passer à l’activité 4 après avoir enregistré votre programme Ardublock .
Bilan de l’activité :
votre robot est autonome : il gère son déplacement en marche avant tout seul car il est programmé pour cela. Le programme est sauvegardé dans la mémoire du microcontrôleur et le robot est autonome en énergie grâce aux piles (ou la batterie) embarquées. Le microcontrôleur exécute le programme en boucle tant que le système est alimenté en énergie.