Programmer un robot suiveur de ligne en utilisant un shield moteur Arduino R3.
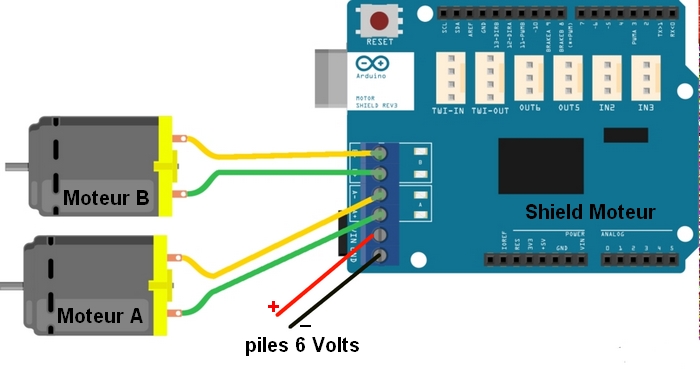
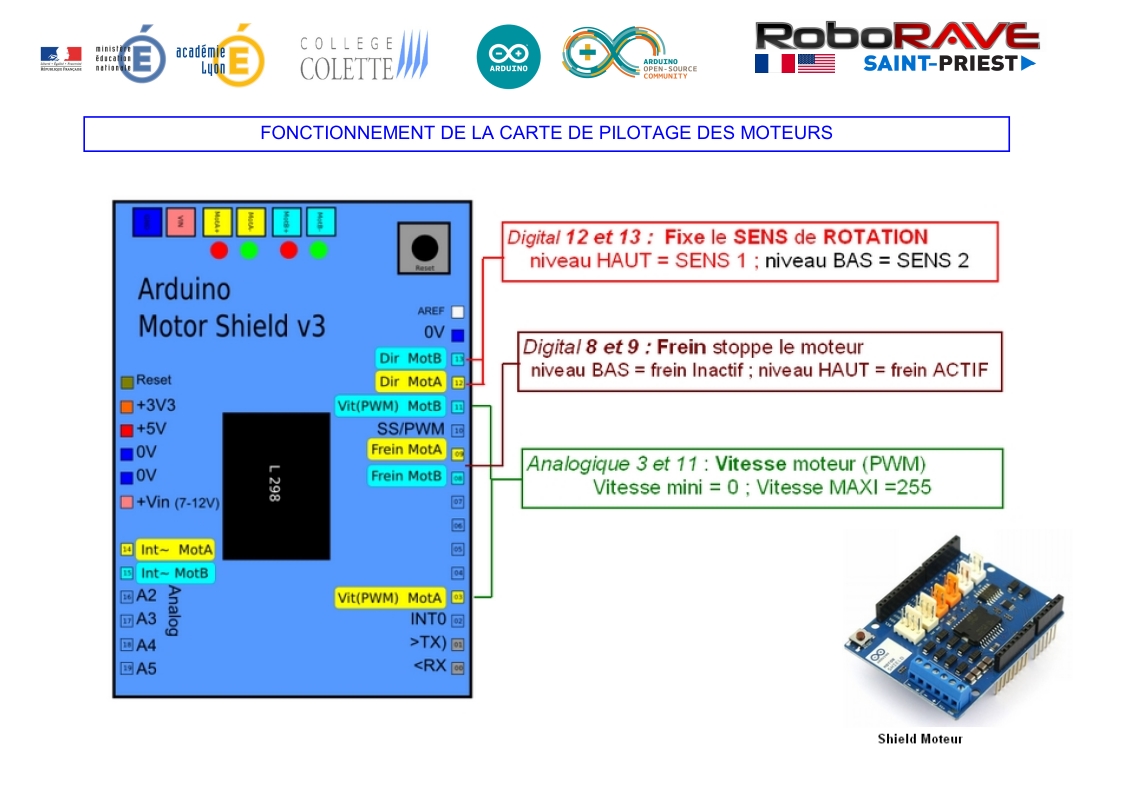
Un Shield moteur est une carte de pilotage des moteurs (pilotage du sens de rotation de deux moteurs à courant continu).
Caractéristiques :
Le shield dispose de 2 canaux, A et B, qui utilise chacun 4 pins (broches) de l’Arduino.
Les deux canaux peuvent être utilisé séparement afin de piloter deux moteurs à courant continu, ou ensemble pour piloter un moteur pas à pas.